We read every piece of feedback, and take your input very seriously.
To see all available qualifiers, see our documentation.
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and privacy statement. We’ll occasionally send you account related emails.
Already on GitHub? Sign in to your account
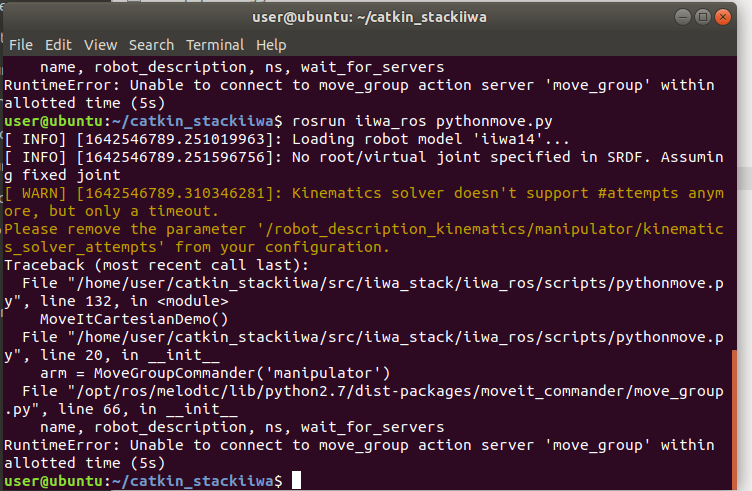
I use a python script to control the iiwa robot. However, when I run the python code, I receive this error.
#!/usr/bin/env python
import rospy, sys import moveit_commander from moveit_commander import MoveGroupCommander from geometry_msgs.msg import Pose from copy import deepcopy
class MoveItCartesianDemo: def init(self):
moveit_commander.roscpp_initialize(sys.argv) rospy.init_node('moveit_cartesian_demo', anonymous=True) arm = MoveGroupCommander('manipulator') arm.allow_replanning(True) arm.set_pose_reference_frame('iiwa_link_0') arm.set_goal_position_tolerance(0.001) arm.set_goal_orientation_tolerance(0.001) arm.set_max_acceleration_scaling_factor(0.5) arm.set_max_velocity_scaling_factor(0.5) end_effector_link = arm.get_end_effector_link() start_pose = arm.get_current_pose(end_effector_link).pose waypoints = [] waypoints.append(start_pose) wpose = deepcopy(start_pose) wpose.position.z -= 0.2 waypoints.append(deepcopy(wpose)) wpose.position.x += 0.1 waypoints.append(deepcopy(wpose)) wpose.position.y += 0.075 waypoints.append(deepcopy(wpose)) wpose.position.y -= 0.075 waypoints.append(deepcopy(wpose)) wpose.position.x -= 0.1 waypoints.append(deepcopy(wpose)) wpose.position.x += 0.05 wpose.position.y += 0.075 waypoints.append(deepcopy(wpose)) wpose.position.y -= 0.15 waypoints.append(deepcopy(wpose)) wpose.position.x -= 0.05 wpose.position.y += 0.075 waypoints.append(deepcopy(wpose)) wpose.position.x -= 0.03 wpose.position.y -= 0.075 waypoints.append(deepcopy(wpose)) fraction = 0.0 maxtries = 100 attempts = 0 arm.set_start_state_to_current_state() while fraction < 1.0 and attempts < maxtries: (plan, fraction) = arm.compute_cartesian_path( waypoints, 0.01, 0.0, True) attempts += 1 if attempts % 10 == 0: rospy.loginfo("Still trying after " + str(attempts) + " attempts...") if fraction == 1.0: rospy.loginfo("Path computed successfully. Moving the arm.") arm.execute(plan) rospy.loginfo("Path execution complete.") else: rospy.loginfo( "Path planning failed with only " + str(fraction) + " success after " + str(maxtries) + " attempts.") rospy.sleep(1) moveit_commander.roscpp_shutdown() moveit_commander.os._exit(0)
if name == "main": try: MoveItCartesianDemo() except rospy.ROSInterruptException: pass
The text was updated successfully, but these errors were encountered:
No branches or pull requests
I use a python script to control the iiwa robot. However, when I run the python code, I receive this error.
#!/usr/bin/env python
-- coding: utf-8 --
import rospy, sys
import moveit_commander
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose
from copy import deepcopy
class MoveItCartesianDemo:
def init(self):
if name == "main":
try:
MoveItCartesianDemo()
except rospy.ROSInterruptException:
pass
The text was updated successfully, but these errors were encountered: