The INTEGRAL library provides routines for the integration of functions of various types. Additionally, the INTEGRAL library provides routines for the integration of systems of ordinary differential equations (ODEs).
The integration routines are provided by QUADPACK, and the ODE routines are provided by ODEPACK.

The following example illustrates the use of an adaptive integrator to compute the integral of an equation over a finite interval.
program example
use iso_fortran_env
use integral_core
implicit none
! Variables
real(real64) :: ans, y, pi, a, b
procedure(integrand), pointer :: fcn
type(adaptive_integrator) :: integrator
! Define the integration limits
pi = 2.0d0 * acos(0.0d0)
a = pi / 6.0d0
b = pi / 4.0d0
! Evaluate the integral
fcn => int_fcn
y = integrator%integrate(fcn, a, b)
! Display the results
ans = 5.0d0 * pi / 12.0d0 - 2.0d0 * sqrt(2.0d0) + 4.0d0 / sqrt(3.0d0)
print '(AEN13.5AEN13.5A)', "The solution is: ", ans, &
", the integrator computed: ", y, "."
contains
! This example is from http://tutorial.math.lamar.edu/Classes/CalcI/ComputingDefiniteIntegrals.aspx#Int_CompDef_Ex3a
! The integrand is: f(x) = 5 - 2 sec(x) tan(x).
! If the integral is considered over the range [pi/6, pi/4], the solution
! is 5 pi / 12 - 2 sqrt(2) + 4 / sqrt(3).
function int_fcn(x) result(f)
real(real64), intent(in) :: x
real(real64) :: f
f = 5.0d0 - 2.0d0 * tan(x) / cos(x) ! Remember, sec(x) = 1 / cos(x)
end function
end programThe solution is: 789.97089E-03, the integrator computed: 789.97089E-03.
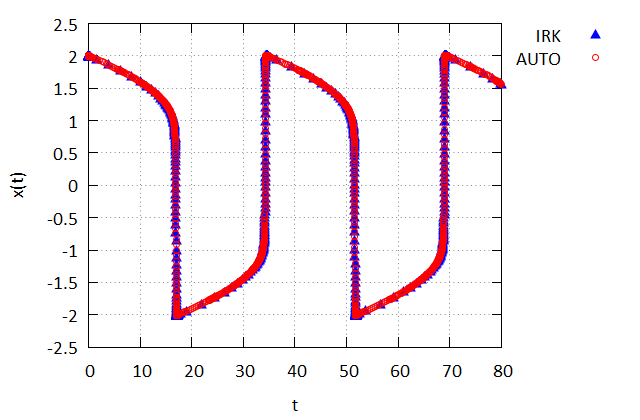
The following example illustrates solution of the Van Der Pol equation comparing two different integrators, an implicit Runge-Kutta integrator (ODE_IRK) and an integrator that automatically switches between an Adams method and a BDF method (ODE_AUTO).
program example
use iso_fortran_env
use integral_core
use fplot_core
implicit none
! Local Variables
type(ode_helper) :: fcn
type(ode_irk) :: integrator1
type(ode_auto) :: integrator2
procedure(ode_fcn), pointer :: ptr
real(real64) :: ic(2), t(2)
real(real64), allocatable, dimension(:,:) :: x1, x2
type(plot_2d) :: plt
type(plot_data_2d) :: d1, d2
class(plot_axis), pointer :: xAxis, yAxis
class(legend), pointer :: lgnd
! Set up the integrator
ptr => vdp
call fcn%define_equations(2, ptr)
! Define the initial conditions
t = [0.0d0, 8.0d1]
ic = [2.0d0, 0.0d0]
! Compute the solution
x1 = integrator1%integrate(fcn, t, ic) ! ODE_IRK integrator
x2 = integrator2%integrate(fcn, t, ic) ! ODE_AUTO integrator
! Display the number of solution points in each
print '(AI0)', "ODE_IRK Solution Point Count: ", size(x1, 1)
print '(AI0)', "ODE_AUTO Solution Point Count: ", size(x2, 1)
! ---------------------------- PLOTTING CODE ----------------------------- !
! Plot the solution
call plt%initialize()
call plt%set_font_size(14)
xAxis => plt%get_x_axis()
call xAxis%set_title("t")
yAxis => plt%get_y_axis()
call yAxis%set_title("x(t)")
lgnd => plt%get_legend()
call lgnd%set_is_visible(.true.)
call lgnd%set_draw_border(.false.)
call lgnd%set_draw_inside_axes(.false.)
call d1%set_name("IRK")
call d1%set_draw_line(.false.)
call d1%set_draw_markers(.true.)
call d1%set_marker_style(MARKER_FILLED_TRIANGLE)
call d1%set_marker_scaling(1.5)
call d1%define_data(x1(:,1), x1(:,2))
call plt%push(d1)
call d2%set_name("AUTO")
call d2%set_draw_line(.false.)
call d2%set_draw_markers(.true.)
call d2%set_marker_style(MARKER_EMPTY_CIRCLE)
call d2%set_line_color(CLR_RED)
call d2%set_line_style(LINE_DASHED)
call d2%define_data(x2(:,1), x2(:,2))
call plt%push(d2)
call plt%draw()
call plt%clear_all()
call d1%define_data(x1(:,2), x1(:,3))
call d2%define_data(x2(:,2), x2(:,3))
call xAxis%set_title("x(t)")
call yAxis%set_title("dx/dt")
call plt%push(d1)
call plt%push(d2)
call plt%draw()
contains
! Van Der Pol Equation
! x" + x - mu * (1 - x**2) * x' = 0
subroutine vdp(t, x, dxdt)
real(real64), intent(in) :: t
real(real64), intent(in), dimension(:) :: x
real(real64), intent(out), dimension(:) :: dxdt
real(real64), parameter :: mu = 20.0d0
dxdt(1) = x(2)
dxdt(2) = mu * (1.0d0 - x(1)**2) * x(2) - x(1)
end subroutine
end programODE_IRK Solution Point Count: 544
ODE_AUTO Solution Point Count: 1283
These are the plots resulting from the above program.

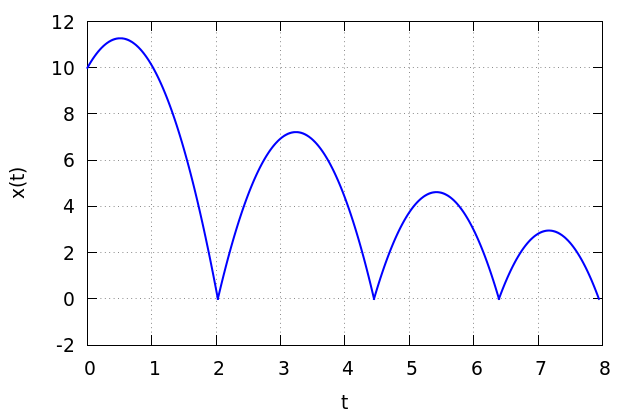
The following example illustrates how to compute the solution to a system of ODEs modeling the bouncing of a ball. The example also utilizes the FPLOT library in order to plot the solution.
program example
use iso_fortran_env
use integral_core
use fplot_core
implicit none
! Parameters
real(real64), parameter :: g = 9.81d0 ! Gravitational acceleration
real(real64), parameter :: k = -0.8d0 ! Coefficient of restitution
! Local Variables
procedure(ode_fcn), pointer :: ptr
procedure(ode_constraint), pointer :: cptr
type(ode_helper) :: fcn
type(ode_auto) :: integrator
integer(int32) :: n
real(real64) :: ic(2), t(2)
real(real64), allocatable, dimension(:,:) :: x1, x2, x3, x4
type(plot_2d) :: plt
type(plot_data_2d) :: d1, d2, d3, d4
class(plot_axis), pointer :: xAxis, yAxis
type(legend), pointer :: lgnd
! Set up the integrator
ptr => ball
cptr => ground_constraint
call fcn%define_equations(2, ptr)
call fcn%define_constraints(1, cptr)
call integrator%set_max_step_size(1.0d-3)
call integrator%set_limit_step_size(.true.)
! Compute the solution
t = [0.0d0, 1.0d1]
ic = [1.0d1, 5.0d0]
x1 = integrator%integrate(fcn, t, ic)
! The integrator stops when the ball first makes contact. As a result, lets
! reset the time limits and initial conditions to continue the integration
n = size(x1, 1)
t(1) = x1(n,1)
ic = [abs(x1(n,2)), k * x1(n,3)]
call integrator%reset()
x2 = integrator%integrate(fcn, t, ic)
! Again
n = size(x2, 1)
t(1) = x2(n,1)
ic = [abs(x2(n,2)), k * x2(n,3)]
call integrator%reset()
x3 = integrator%integrate(fcn, t, ic)
! Again
n = size(x3, 1)
t(1) = x3(n,1)
ic = [abs(x3(n,2)), k * x3(n,3)]
call integrator%reset()
x4 = integrator%integrate(fcn, t, ic)
! Plot the solution
call plt%initialize()
call plt%set_font_size(14)
lgnd => plt%get_legend()
call lgnd%set_is_visible(.false.)
xAxis => plt%get_x_axis()
call xAxis%set_title("t")
yAxis => plt%get_y_axis()
call yAxis%set_title("x(t)")
call d1%set_line_color(CLR_BLUE)
call d1%set_line_width(2.0)
call d1%define_data(x1(:,1), x1(:,2))
call d2%set_line_color(CLR_BLUE)
call d2%set_line_width(2.0)
call d2%define_data(x2(:,1), x2(:,2))
call d3%set_line_color(CLR_BLUE)
call d3%set_line_width(2.0)
call d3%define_data(x3(:,1), x3(:,2))
call d4%set_line_color(CLR_BLUE)
call d4%set_line_width(2.0)
call d4%define_data(x4(:,1), x4(:,2))
call plt%push(d1)
call plt%push(d2)
call plt%push(d3)
call plt%push(d4)
call plt%draw()
contains
! A bouncing ball can be described by the following equation:
! x" = -g
!
! Where g = gravitational acceleration
subroutine ball(t, x, dxdt)
real(real64), intent(in) :: t
real(real64), intent(in), dimension(:) :: x
real(real64), intent(out), dimension(:) :: dxdt
dxdt(1) = x(2)
dxdt(2) = -g
end subroutine
! The constraint function
subroutine ground_constraint(t, x, f)
real(real64), intent(in) :: t
real(real64), intent(in), dimension(:) :: x
real(real64), intent(out), dimension(:) :: f
f(1) = x(1) ! Find when x == 0
end subroutine
end programThis is the plot resulting from the above program.
Documentation can be found here.
This library utilizes CMake to facilitate its build. Using CMake is as simple as issuing the following commands.
- cmake ...
- make
- make install
This library depends upon the following libraries.
See Running CMake for more details on the use of CMake.