



This project aims to automatically compute the correct scale of a point cloud generated with COLMAP by placing an aruco marker into the scene.
This repository is tested on Python 3.6+ and can be installed from PyPi
pip install aruco-estimator
An exemplary data set is provided. The dataset shows a simple scene of a door with an aruco marker. Other dataset might follow in future work. It can be downloaded by using
from aruco_estimator import download
dataset = download.Dataset()
dataset.download_door_dataset(output_path='.')An example of how to use the aruco estimator is shown below.
from aruco_estimator.aruco_scale_factor import ArucoScaleFactor
from aruco_estimator.visualization import ArucoVisualization
from aruco_estimator import download
from colmap_wrapper.colmap import COLMAP
import os
import open3d as o3d
# Download example dataset. Door dataset is roughly 200 MB
dataset = download.Dataset()
dataset.download_door_dataset()
# Load Colmap project folder
project = COLMAP(project_path=dataset.dataset_path, image_resize=0.4)
# Init & run pose estimation of corners in 3D & estimate mean L2 distance between the four aruco corners
aruco_scale_factor = ArucoScaleFactor(photogrammetry_software=project, aruco_size=dataset.scale)
aruco_distance, aruco_corners_3d = aruco_scale_factor.run()
print('Size of the unscaled aruco markers: ', aruco_distance)
# Calculate scaling factor, apply it to the scene and save scaled point cloud
dense, scale_factor = aruco_scale_factor.apply()
print('Point cloud and poses are scaled by: ', scale_factor)
print('Size of the scaled (true to scale) aruco markers in meters: ', aruco_distance * scale_factor)
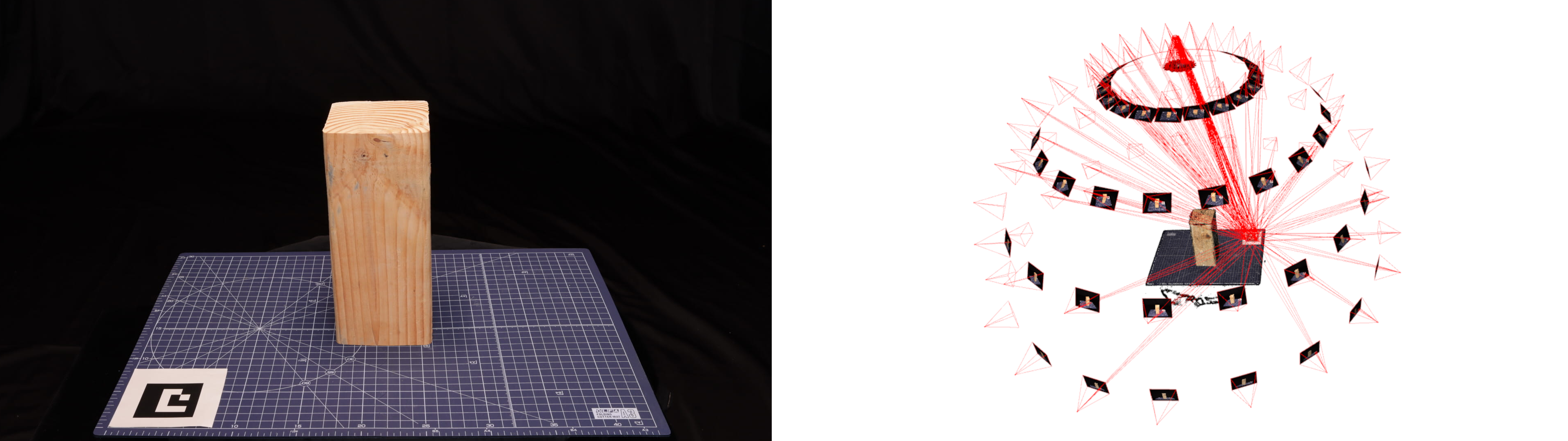
# Visualization of the scene and rays
vis = ArucoVisualization(aruco_colmap=aruco_scale_factor)
vis.visualization(frustum_scale=0.7, point_size=0.1)
# Write Data
aruco_scale_factor.write_data()In some cases COLMAP is not able to registrate all images into one dense reconstruction. If appears to be reconstructed
into two seperated reconstruction. To registrate both (up to know only two are possible) reconstructions the aruco
markers are used to registrate both sides using ArucoMarkerScaledRegistration.
from aruco_estimator.registration import ArucoMarkerScaledRegistration
scaled_registration = ArucoMarkerScaledRegistration(project_path_a=[path2part1],
project_path_b=[path2part2])
scaled_registration.scale(debug=True)
scaled_registration.registrate(manual=False, debug=True)
scaled_registration.write()If you want to install the repo from source make sure that conda is installed. Afterwards clone this repository, give the bash file executable rights and install the conda env:
git clone https://github.com/meyerls/aruco-estimator.git
cd aruco-estimator
chmod u+x init_env.sh
# You might need a password to install exiftools
./init_env.sh
To test the code on your local machine try the example project by using:
python3 aruco_estimator/test.py --test_data --visualize --frustum_size 0.4


- Up to now only SIMPLE_RADIAL and PINHOLE camera models are supported. Extend all models
- Up to now only one aruco marker per scene can be detected. Multiple aruco marker could improve the scale estimation
- Different aruco marker settings and marker types should be investigated for different scenarios to make it either more robust to false detections
- Geo referencing of aruco markers with earth coordinate system using GPS or RTK
- Only COLMAP is supported. Add additional reconstruction software.
- The Code to read out the binary COLMAP data is partly borrowed from the repo COLMAP Utility Scripts by uzh-rpg.
- Thanks to Baptiste for providing the data for the wooden block reconstruction. Source from [1]
- In some cases cv2 does not detect the aruco marker module. Reinstalling opencv-python and opencv-python-python might help Source
- PyExifTool: A library to communicate with the ExifTool command- application. If you have trouble installing it please refer to the PyExifTool-Homepage.
# For Ubuntu users:
wget https://exiftool.org/Image-ExifTool-12.51.tar.gz
gzip -dc Image-ExifTool-12.51.tar.gz | tar -xf -
cd Image-ExifTool-12.51
perl Makefile.PL
make test
sudo make installPlease cite this paper, if this work helps you with your research:
@InProceedings{ ,
author="",
title="",
booktitle="",
year="",
pages="",
isbn=""
}