diff --git a/.github/workflows/python-package.yml b/.github/workflows/python-package.yml
index 46d80d1..9e683dc 100644
--- a/.github/workflows/python-package.yml
+++ b/.github/workflows/python-package.yml
@@ -19,7 +19,7 @@ jobs:
- name: 'Install dependencies'
run: |
python -m pip install --upgrade pip
- pip install .
+ pip install -e .
- name: 'Install ExifTools'
run: |
wget https://exiftool.org/Image-ExifTool-12.51.tar.gz
@@ -31,7 +31,8 @@ jobs:
- name: 'Test Aruco Scale Factor Estimation'
run: |
exiftool -ver
- python3 scale_estimator.py --test_data
+ pip install -e .
+ python3 aruco_estimator/test.py --test_data
#- name: 'Upload Artifact'
# uses: actions/upload-artifact@v3
# with:
diff --git a/README.md b/README.md
index 8d9af8f..c929568 100644
--- a/README.md
+++ b/README.md
@@ -1,5 +1,5 @@
-  +
+ 
# Automatic Estimation of the Scale Factor Based on Aruco Markers (Work in Progress!)
@@ -46,20 +46,15 @@ dataset = download.Dataset()
dataset.download_door_dataset(output_path='.')
````
-### API
+### Scale Factor Estimation
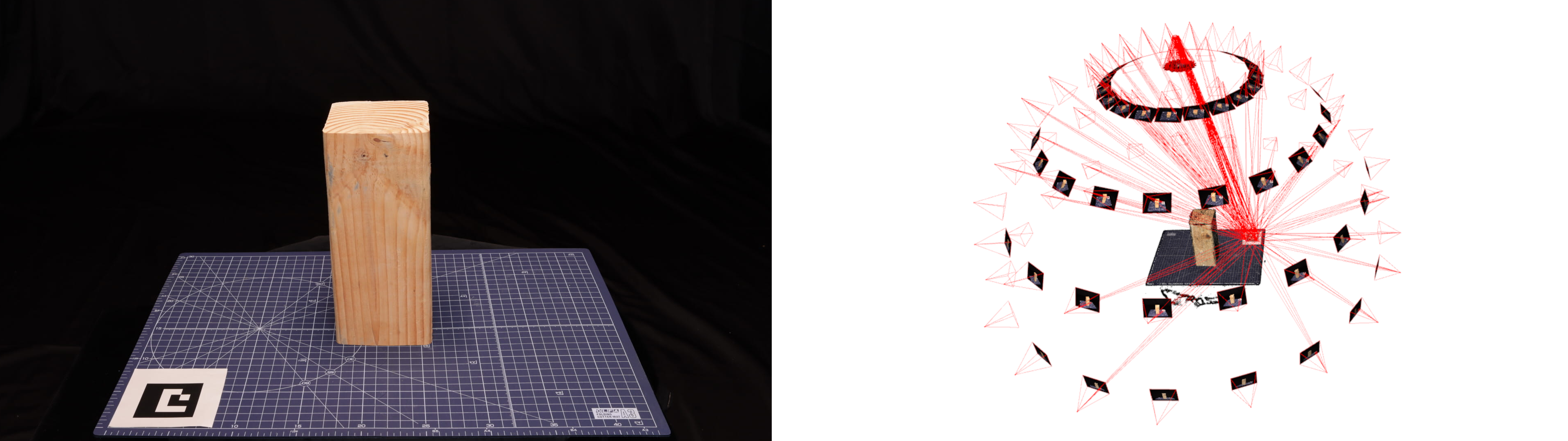
-A use of the code on the provided dataset can be seen in the following block. The most important function is
-``aruco_scale_factor.run()``. Here, an aruco marker is searched for in each image. If a marker is found in at
-least 2 images, the position of the aruco corner in 3D is calculated based on the camera poses and the corners of
-the aruco maker.Based on the positions of the corners of the square aruco marker, the size of the marker in the unscaled
-reconstruction can be determined. With the correct metric size of the marker, the scene can be scaled true to scale
-using ``aruco_scale_factor.apply(true_scale)``.
+An example of how to use the aruco estimator is shown below.
````python
from aruco_estimator.aruco_scale_factor import ArucoScaleFactor
from aruco_estimator.visualization import ArucoVisualization
from aruco_estimator import download
-from colmap_wrapper.colmap import COLMAPProject
+from colmap_wrapper.colmap import COLMAP
import os
import open3d as o3d
@@ -68,11 +63,11 @@ dataset = download.Dataset()
dataset.download_door_dataset()
# Load Colmap project folder
-project = COLMAPProject(project_path=dataset.dataset_path, image_resize=0.4)
+project = COLMAP(project_path=dataset.dataset_path, image_resize=0.4)
# Init & run pose estimation of corners in 3D & estimate mean L2 distance between the four aruco corners
aruco_scale_factor = ArucoScaleFactor(photogrammetry_software=project, aruco_size=dataset.scale)
-aruco_distance = aruco_scale_factor.run()
+aruco_distance, aruco_corners_3d = aruco_scale_factor.run()
print('Size of the unscaled aruco markers: ', aruco_distance)
# Calculate scaling factor, apply it to the scene and save scaled point cloud
@@ -88,6 +83,23 @@ vis.visualization(frustum_scale=0.7, point_size=0.1)
aruco_scale_factor.write_data()
````
+### Registration and Scaling
+
+In some cases COLMAP is not able to registrate all images into one dense reconstruction. If appears to be reconstructed
+into two seperated reconstruction. To registrate both (up to know only two are possible) reconstructions the aruco
+markers are used to registrate both sides using ```ArucoMarkerScaledRegistration```.
+
+```python
+from aruco_estimator.registration import ArucoMarkerScaledRegistration
+
+scaled_registration = ArucoMarkerScaledRegistration(project_path_a=[path2part1],
+ project_path_b=[path2part2])
+scaled_registration.scale(debug=True)
+scaled_registration.registrate(manual=False, debug=True)
+scaled_registration.write()
+```
+
+
## Source
If you want to install the repo from source make sure that conda is installed. Afterwards clone this repository, give
@@ -104,14 +116,14 @@ chmod u+x init_env.sh
To test the code on your local machine try the example project by using:
````angular2html
-python3 scale_estimator.py --test_data
+python3 aruco_estimator/test.py --test_data --visualize --frustum_size 0.4
````
-  +
+ 
-  +
+ 
## Limitation / Improvements
@@ -132,7 +144,7 @@ repo [COLMAP Utility Scripts](https://github.com/uzh-rpg/colmap_utils) by [uzh-r
## Trouble Shooting
-*In some cases cv2 does not detect the aruco marker module. Reinstalling opencv-python and opencv-python-python might
+* In some cases cv2 does not detect the aruco marker module. Reinstalling opencv-python and opencv-python-python might
help [Source](https://stackoverflow.com/questions/45972357/python-opencv-aruco-no-module-named-cv2-aruco)
* [PyExifTool](https://github.com/sylikc/pyexiftool): A library to communicate with the [ExifTool](https://exiftool.org)
command- application. If you have trouble installing it please refer to the PyExifTool-Homepage.
@@ -155,7 +167,7 @@ Please cite this paper, if this work helps you with your research:
```
@InProceedings{ ,
- author="H",
+ author="",
title="",
booktitle="",
year="",
diff --git a/aruco_estimator/__init__.py b/aruco_estimator/__init__.py
index 26cea44..4c2fc1c 100644
--- a/aruco_estimator/__init__.py
+++ b/aruco_estimator/__init__.py
@@ -12,10 +12,11 @@
# ...
# Own modules
-from aruco_estimator import aruco
-from aruco_estimator import aruco_scale_factor
-from aruco_estimator import base
-from aruco_estimator import download
-from aruco_estimator import opt
-from aruco_estimator import visualization
+from . import aruco
+from . import aruco_scale_factor
+from . import base
+from . import download
+from . import opt
+from . import visualization
+from . import utils
diff --git a/aruco_estimator/aruco.py b/aruco_estimator/aruco.py
index b4c1007..02bf603 100644
--- a/aruco_estimator/aruco.py
+++ b/aruco_estimator/aruco.py
@@ -123,12 +123,14 @@ def detect_aruco_marker(image: np.ndarray, dict_type: int = aruco.DICT_4X4_1000,
else:
raise NotImplementedError
+ image_size = image.shape
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
- corners, aruco_id, rejected_img_points = aruco.detectMarkers(gray, aruco_dict,
+ corners, aruco_id, rejected_img_points = aruco.detectMarkers(gray,
+ aruco_dict,
parameters=aruco_parameters)
if aruco_id is None:
- return None, None
+ return None, None, image_size
if False:
if len(corners) > 0:
@@ -167,4 +169,4 @@ def detect_aruco_marker(image: np.ndarray, dict_type: int = aruco.DICT_4X4_1000,
del gray
del image
- return corners, aruco_id
+ return corners, aruco_id, image_size
diff --git a/aruco_estimator/aruco_scale_factor.py b/aruco_estimator/aruco_scale_factor.py
index d2be2f6..1daa637 100644
--- a/aruco_estimator/aruco_scale_factor.py
+++ b/aruco_estimator/aruco_scale_factor.py
@@ -5,20 +5,20 @@
Licensed under the MIT License.
See LICENSE file for more information.
"""
+from multiprocessing import Pool
+
# Built-in/Generic Imports
from copy import deepcopy
import os
import time
from functools import partial
from functools import wraps
-from multiprocessing import Pool
-
# Libs
from tqdm import tqdm
+
# Own modules
-from colmap_wrapper.colmap.colmap import COLMAPProject
from colmap_wrapper.colmap.utils import generate_colmap_sparse_pc
-
+from colmap_wrapper.colmap.bin import write_cameras_text, write_images_text, write_points3D_text
from aruco_estimator.aruco import *
from aruco_estimator.opt import *
from aruco_estimator.base import *
@@ -41,7 +41,8 @@ def timeit_wrapper(*args, **kwargs):
class ArucoScaleFactor(ScaleFactorBase):
- def __init__(self, photogrammetry_software: COLMAPProject, aruco_size: float, dense_path: str = 'fused.ply'):
+ def __init__(self, photogrammetry_software: Union[COLMAPProject, COLMAP], aruco_size: float,
+ dense_path: str = 'fused.ply'):
"""
This class is used to determine 3D points of the aruco marker, which are used to compute a scaling factor.
In the following the workflow is shortly described.
@@ -91,7 +92,7 @@ def __init__(self, photogrammetry_software: COLMAPProject, aruco_size: float, de
# Multi Processing
self.progress_bar = True
- self.num_processes = 8 if os.cpu_count() > 8 else os.cpu_count()
+ self.num_processes = 12 if os.cpu_count() > 12 else os.cpu_count()
print('Num process: ', self.num_processes)
self.image_names = []
# Prepare parsed data for multi processing
@@ -99,10 +100,10 @@ def __init__(self, photogrammetry_software: COLMAPProject, aruco_size: float, de
self.image_names.append(self.photogrammetry_software._src_image_path.joinpath(
self.photogrammetry_software.images[image_idx].name).__str__())
- #if os.path.exists(self.photogrammetry_software._project_path.joinpath('aruco_size.txt')):
+ # if os.path.exists(self.photogrammetry_software._project_path.joinpath('aruco_size.txt')):
# self.aruco_size = float(
# open(self.photogrammetry_software._project_path.joinpath('aruco_size.txt'), 'r').read())
- #else:
+ # else:
self.aruco_size = aruco_size
def run(self) -> [np.ndarray, None]:
@@ -121,7 +122,7 @@ def run(self) -> [np.ndarray, None]:
N=self.N.reshape(len(self.N) // 12, 4, 3))
self.aruco_distance = self.__evaluate(self.aruco_corners_3d)
- return self.aruco_distance
+ return self.aruco_distance, self.aruco_corners_3d
@timeit
def __detect(self):
@@ -146,12 +147,26 @@ def __detect(self):
# else:
# self.aruco_marker_detected = True
- for image_idx in self.photogrammetry_software.images.keys():
- self.photogrammetry_software.images[image_idx].aruco_corners = result[image_idx - 1][0]
- self.photogrammetry_software.images[image_idx].aruco_id = result[image_idx - 1][1]
- self.photogrammetry_software.images[image_idx].image_path = self.image_names[image_idx - 1]
+ aruco_ids = []
+
+ for image_idx, image_key in enumerate(self.photogrammetry_software.images.keys()):
+ ratio_x = self.photogrammetry_software.cameras[1].width / result[image_idx][2][1]
+ ratio_y = self.photogrammetry_software.cameras[1].height / result[image_idx][2][0]
+ if result[image_idx][0] != None:
+ corners = (np.expand_dims(np.vstack([result[image_idx][0][0][0, :, 0] * ratio_y,
+ result[image_idx][0][0][0, :, 1] * ratio_x]).T, axis=0),)
+ self.photogrammetry_software.images[image_key].aruco_corners = corners
+ aruco_ids.append(result[image_idx][1][0][0])
+ else:
+ self.photogrammetry_software.images[image_key].aruco_corners = result[image_idx][0]
+
+ self.photogrammetry_software.images[image_key].aruco_id = result[image_idx][1]
+ self.photogrammetry_software.images[image_key].image_path = self.image_names[image_idx]
# self.images[image_idx].image = cv2.resize(result[image_idx - 1][2], (0, 0), fx=0.3, fy=0.3)
+ # Only one aruco marker is allowed. Todo: Extend to multiple possible aruco markers
+ self.dominant_aruco_id = np.argmax(np.bincount(aruco_ids))
+
def __ray_cast(self):
"""
This function casts a ray from the origin of the camera center C_i (also the translational part of the extrinsic
@@ -164,21 +179,28 @@ def __ray_cast(self):
"""
for image_idx in self.photogrammetry_software.images.keys():
if self.photogrammetry_software.images[image_idx].aruco_corners is not None:
- p0, n = ray_cast_aruco_corners(extrinsics=self.photogrammetry_software.images[image_idx].extrinsics,
- intrinsics=self.photogrammetry_software.images[image_idx].intrinsics.K,
- corners=self.photogrammetry_software.images[image_idx].aruco_corners)
- self.photogrammetry_software.images[image_idx].p0 = p0
- self.photogrammetry_software.images[image_idx].n = n
-
- self.P0 = np.append(self.P0, p0)
- self.N = np.append(self.N, n)
+ if self.photogrammetry_software.images[image_idx].aruco_id[0, 0] == self.dominant_aruco_id:
+ p0, n = ray_cast_aruco_corners(extrinsics=self.photogrammetry_software.images[image_idx].extrinsics,
+ intrinsics=self.photogrammetry_software.images[
+ image_idx].intrinsics.K,
+ corners=self.photogrammetry_software.images[image_idx].aruco_corners)
+ self.photogrammetry_software.images[image_idx].p0 = p0
+ self.photogrammetry_software.images[image_idx].n = n
+
+ self.P0 = np.append(self.P0, p0)
+ self.N = np.append(self.N, n)
+ else:
+ self.photogrammetry_software.images[image_idx].aruco_corners = None
+ self.photogrammetry_software.images[image_idx].aruco_id = None
@staticmethod
def __evaluate(aruco_corners_3d: np.ndarray) -> np.ndarray:
"""
Calculates the L2 norm between every neighbouring aruco corner. Finally the distances are averaged and returned
- :return:
+
+ @param aruco_corners_3d:
+ @return:
"""
dist1 = np.linalg.norm(aruco_corners_3d[0] - aruco_corners_3d[1])
dist2 = np.linalg.norm(aruco_corners_3d[1] - aruco_corners_3d[2])
@@ -213,7 +235,7 @@ def analyze(self):
plt.show()
def get_dense_scaled(self):
- return self.dense_scaled
+ return self.photogrammetry_software.dense_scaled
def get_sparse_scaled(self):
return generate_colmap_sparse_pc(self.sparse_scaled)
@@ -252,17 +274,20 @@ def apply(self) -> Tuple[o3d.pybind.geometry.PointCloud, float]:
def write_data(self):
pcd_scaled = self.photogrammetry_software._project_path
- cameras_scaled = self.photogrammetry_software._project_path.joinpath('sparse_scaled/cameras')
- images_scaled = self.photogrammetry_software._project_path.joinpath('sparse_scaled/images')
- points_scaled = self.photogrammetry_software._project_path.joinpath('sparse_scaled/points3D')
+ sparse_scaled_path = self.photogrammetry_software._project_path.joinpath('sparse_scaled')
+ cameras_scaled = sparse_scaled_path.joinpath('cameras.txt')
+ images_scaled = sparse_scaled_path.joinpath('images.txt')
+ points_scaled = sparse_scaled_path.joinpath('points3D.txt')
+
+ sparse_scaled_path.mkdir(parents=True, exist_ok=True)
- cameras_scaled.mkdir(parents=True, exist_ok=True)
- images_scaled.mkdir(parents=False, exist_ok=True)
- points_scaled.mkdir(parents=False, exist_ok=True)
+ write_cameras_text(self.photogrammetry_software.cameras, cameras_scaled)
+ write_images_text(self.photogrammetry_software.images_scaled, images_scaled)
+ write_points3D_text(self.sparse_scaled, points_scaled)
- for image_idx in self.photogrammetry_software.images_scaled.keys():
- filename = images_scaled.joinpath('image_{:04d}.txt'.format(image_idx - 1))
- np.savetxt(filename, self.photogrammetry_software.images[image_idx].extrinsics.flatten())
+ # for image_idx in self.photogrammetry_software.images_scaled.keys():
+ # filename = images_scaled.joinpath('image_{:04d}.txt'.format(image_idx - 1))
+ # np.savetxt(filename, self.photogrammetry_software.images[image_idx].extrinsics.flatten())
o3d.io.write_point_cloud(os.path.join(pcd_scaled, 'scaled.ply'), self.photogrammetry_software.dense_scaled)
@@ -272,13 +297,13 @@ def write_data(self):
if __name__ == '__main__':
- from colmap_wrapper.colmap import COLMAPProject
+ from colmap_wrapper.colmap import COLMAP
from aruco_estimator.visualization import ArucoVisualization
- project = COLMAPProject(project_path='../data/door', image_resize=0.4)
+ project = COLMAP(project_path='../data/door', image_resize=0.4)
aruco_scale_factor = ArucoScaleFactor(photogrammetry_software=project, aruco_size=0.15)
- aruco_distance = aruco_scale_factor.run()
+ aruco_distance, aruco_points3d = aruco_scale_factor.run()
print('Mean distance between aruco markers: ', aruco_distance)
aruco_scale_factor.analyze()
diff --git a/aruco_estimator/base.py b/aruco_estimator/base.py
index 4d44cfb..72eb96b 100644
--- a/aruco_estimator/base.py
+++ b/aruco_estimator/base.py
@@ -40,7 +40,7 @@ def __init__(self, photogrammetry_software: COLMAPProject):
| Apply |
---------------
"""
- self.photogrammetry_software = photogrammetry_software
+ self.photogrammetry_software = photogrammetry_software.projects
def __detect(self):
return NotImplemented
diff --git a/aruco_estimator/registration.py b/aruco_estimator/registration.py
new file mode 100644
index 0000000..81b2784
--- /dev/null
+++ b/aruco_estimator/registration.py
@@ -0,0 +1,141 @@
+#!/usr/bin/env python
+# -*- coding: utf-8 -*-
+"""
+Copyright (c) 2022 Lukas Meyer
+Licensed under the MIT License.
+See LICENSE file for more information.
+"""
+import numpy as np
+import os
+import open3d as o3d
+from copy import deepcopy
+from typing import Union
+
+# Own modules
+from colmap_wrapper.colmap import COLMAP
+from aruco_estimator.aruco_scale_factor import ArucoScaleFactor
+from aruco_estimator.visualization import ArucoVisualization
+from aruco_estimator.utils import align_point_set, plot_aligned_pointset, manual_registration
+
+
+class ArucoMarkerScaledRegistration(object):
+ def __init__(self, project_path_a: str, project_path_b: str, dense_pc: str = 'fused.ply'):
+ # Name of both subprojects
+ self.project_path_a = project_path_a
+ self.project_path_b = project_path_b
+
+ # Name of dense point cloud (incase it is cropped)
+ self.dense_pc = dense_pc
+
+ self.project_a: COLMAP = None
+ self.project_b: COLMAP = None
+
+ # Load COLMAP projects
+ self.load_projects()
+
+ # ArucoScaleFactor class for estimating scale factor
+ self.aruco_scale_factor_a: ArucoScaleFactor = None
+ self.aruco_scale_factor_b: ArucoScaleFactor = None
+
+ # Sorted array with 3d location of all 4 aruco corners
+ self.aruco_corners_3d_a: np.ndarray = None
+ self.aruco_corners_3d_b: np.ndarray = None
+
+ # Scaled point cloud
+ self.pcd_a: o3d.geometry.PointCloud = None
+ self.pcd_b: o3d.geometry.PointCloud = None
+ self.pcd_combined: o3d.geometry.PointCloud = None
+
+ # Scale factor for individual point clouds
+ self.scale_factor_a: float = None
+ self.scale_factor_b: float = None
+
+ # Transformation matrix (4x4) to scale, rotate and translate pcd
+ self.transformation_b2a: np.ndarray = None
+
+ def load_projects(self):
+ self.project_a = COLMAP(self.project_path_a, image_resize=0.3, dense_pc=self.dense_pc)
+ self.project_b = COLMAP(self.project_path_b, image_resize=0.3, dense_pc=self.dense_pc)
+
+ def scale(self, debug=False):
+ self.aruco_scale_factor_a = ArucoScaleFactor(photogrammetry_software=self.project_a, aruco_size=0.3)
+ self.aruco_scale_factor_b = ArucoScaleFactor(photogrammetry_software=self.project_b, aruco_size=0.3)
+
+ aruco_distance_a, self.aruco_corners_3d_a = self.aruco_scale_factor_a.run()
+ aruco_distance_b, self.aruco_corners_3d_b = self.aruco_scale_factor_b.run()
+
+ self.pcd_a, self.scale_factor_a = self.aruco_scale_factor_a.apply()
+ self.pcd_b, self.scale_factor_b = self.aruco_scale_factor_b.apply()
+
+ if debug:
+ # Visualization of the scene and rays
+ vis = ArucoVisualization(aruco_colmap=self.aruco_scale_factor_a)
+ vis.visualization(frustum_scale=0.3, point_size=0.1)
+
+ # Visualization of the scene and rays
+ vis = ArucoVisualization(aruco_colmap=self.aruco_scale_factor_b)
+ vis.visualization(frustum_scale=0.3, point_size=0.1)
+
+ o3d.visualization.draw_geometries([self.pcd_a, self.pcd_b])
+
+ def registrate(self, additional_points: Union[type(None), tuple], manual=False, debug=False):
+
+ if additional_points:
+ self.aruco_corners_3d_a = np.vstack([self.aruco_corners_3d_a, additional_points[0]])
+ self.aruco_corners_3d_b = np.vstack([self.aruco_corners_3d_b, additional_points[1]])
+
+ if manual:
+ manual_points_1, manual_points_2 = manual_registration(self.pcd_a, self.pcd_b)
+ self.aruco_corners_3d_a = np.vstack([self.aruco_corners_3d_a, manual_points_1])
+ self.aruco_corners_3d_b = np.vstack([self.aruco_corners_3d_b, manual_points_2])
+
+ # Scale 3d aruco corners for alignment
+ scaled_aruco_corners_a = self.scale_factor_a * self.aruco_corners_3d_a
+ scaled_aruco_corners_b = self.scale_factor_b * self.aruco_corners_3d_b
+
+ A, B, transformation_b2a = align_point_set(scaled_aruco_corners_a, scaled_aruco_corners_b)
+
+ if debug:
+ plot_aligned_pointset(A, B)
+
+ # Init 4x4 transformation matrix
+ self.transformation_b2a = np.eye(4)
+ self.transformation_b2a[:3, :4] = np.hstack(
+ [(transformation_b2a[1]) * transformation_b2a[0], np.expand_dims(transformation_b2a[2], axis=0).T])
+
+ pcd_b_transformed = self.pcd_b.transform(self.transformation_b2a)
+ self.pcd_combined = deepcopy(self.pcd_a)
+ self.pcd_combined += pcd_b_transformed
+
+ if debug:
+ viewer = o3d.visualization.Visualizer()
+ viewer.create_window(window_name='Combined PCD')
+
+ viewer.add_geometry(self.pcd_combined)
+ opt = viewer.get_render_option()
+ # opt.show_coordinate_frame = True
+ opt.point_size = 0.01
+ opt.line_width = 0.01
+ opt.background_color = np.asarray([1, 1, 1])
+ viewer.run()
+ viewer.destroy_window()
+
+ def write(self):
+ common_path = os.path.commonpath(([self.project_path_a, self.project_path_b]))
+ # Save combined pcd and transformation from a to b
+ o3d.io.write_point_cloud(os.path.join(common_path, './combined.ply'), self.pcd_combined)
+ np.savetxt(os.path.join(common_path, 'transformation_b2a.txt'), self.transformation_b2a)
+
+ self.aruco_scale_factor_a.write_data()
+ self.aruco_scale_factor_b.write_data()
+
+
+if __name__ == '__main__':
+ scaled_registration = ArucoMarkerScaledRegistration(project_path_a="/home/luigi/Documents/reco/Baum 8/side_1",
+ project_path_b="/home/luigi/Documents/reco/Baum 8/side_2",
+ dense_pc='cropped.ply')
+ scaled_registration.scale(debug=False)
+ point_set = (np.asarray([-3.074686, -3.703092, 4.512500]), np.asarray([-4.271004, -4.733126, 3.378184])) # Baum 08
+ # (np.asarray([-4.037381, -1.749546, 6.646245]), np.asarray([2.538995, -4.001166, 4.676914])) # Baum 07
+ scaled_registration.registrate(additional_points=point_set, manual=False, debug=True)
+ scaled_registration.write()
diff --git a/scale_estimator.py b/aruco_estimator/test.py
similarity index 94%
rename from scale_estimator.py
rename to aruco_estimator/test.py
index ef4619d..5299863 100644
--- a/scale_estimator.py
+++ b/aruco_estimator/test.py
@@ -10,7 +10,7 @@
# Built-in/Generic Imports
import argparse
-from colmap_wrapper.colmap import COLMAPProject
+from colmap_wrapper.colmap import COLMAP
# Own modules
from aruco_estimator.aruco_scale_factor import ArucoScaleFactor, DEBUG
@@ -44,13 +44,13 @@
raise ValueError('--colmap_project is empty! Please select a path to our colmap project or test it with our '
'dataset by setting the flag --test_data')
- project = COLMAPProject(project_path=args.colmap_project, image_resize=0.4)
+ project = COLMAP(project_path=args.colmap_project, image_resize=0.4)
# Init & run pose estimation of corners in 3D & estimate mean L2 distance between the four aruco corners
aruco_scale_factor = ArucoScaleFactor(photogrammetry_software=project,
aruco_size=args.aruco_size,
dense_path=args.dense_model)
- aruco_distance = aruco_scale_factor.run()
+ aruco_distance, aruco_corners_3d = aruco_scale_factor.run()
print('Size of the unscaled aruco markers: ', aruco_distance)
# Calculate scaling factor and apply to scene
diff --git a/aruco_estimator/utils.py b/aruco_estimator/utils.py
new file mode 100644
index 0000000..2bdba7b
--- /dev/null
+++ b/aruco_estimator/utils.py
@@ -0,0 +1,143 @@
+#!/usr/bin/env python
+# -*- coding: utf-8 -*-
+"""
+Copyright (c) 2022 Lukas Meyer
+Licensed under the MIT License.
+See LICENSE file for more information.
+"""
+
+import numpy as np
+import open3d as o3d
+from copy import copy
+
+
+def kabsch_umeyama(pointset_A, pointset_B):
+ """
+ Kabsch–Umeyama algorithm is a method for aligning and comparing the similarity between two sets of points.
+ It finds the optimal translation, rotation and scaling by minimizing the root-mean-square deviation (RMSD)
+ of the point pairs.
+
+ Source and Explenation: https://zpl.fi/aligning-point-patterns-with-kabsch-umeyama-algorithm/
+
+ @param pointset_A: array of a set of points in n-dim
+ @param pointset_B: array of a set of points in n-dim
+ @return: Rotation Matrix (3x3), scaling (scalar) translation vector (3x1)
+ """
+ assert pointset_A.shape == pointset_B.shape
+ n, m = pointset_A.shape
+
+ # Find centroids of both point sets
+ EA = np.mean(pointset_A, axis=0)
+ EB = np.mean(pointset_B, axis=0)
+
+ VarA = np.mean(np.linalg.norm(pointset_A - EA, axis=1) ** 2)
+
+ # Covariance matrix
+ H = ((pointset_A - EA).T @ (pointset_B - EB)) / n
+
+ # SVD H = UDV^T
+ U, D, VT = np.linalg.svd(H)
+
+ # Detect and prevent reflection
+ d = np.sign(np.linalg.det(U) * np.linalg.det(VT))
+ S = np.diag([1] * (m - 1) + [d])
+
+ # rotation, scaling and translation
+ R = U @ S @ VT
+ c = VarA / np.trace(np.diag(D) @ S)
+ t = EA - c * R @ EB
+
+ return R, c, t
+
+
+def align_point_set(point_set_A, point_set_B):
+ R, c, t = kabsch_umeyama(np.asarray(point_set_A), np.asarray(point_set_B))
+
+ point_set_B = np.array([t + c * R @ b for b in point_set_B])
+
+ return point_set_A, point_set_B, [R, c, t]
+
+
+def plot_aligned_pointset(A, B):
+ """
+ Visualize transformed point set
+ @param A: array of a set of points in n-dim
+ @param B: array of a set of points in n-dim
+ @return: both point clouds
+ """
+
+
+ pcdA = o3d.geometry.PointCloud()
+ pcdA.points = o3d.utility.Vector3dVector(A)
+
+ pcdB = o3d.geometry.PointCloud()
+ pcdB.points = o3d.utility.Vector3dVector(B)
+
+
+ o3d.visualization.draw_geometries([pcdA, pcdB])
+
+ return pcdA, pcdB
+
+
+def get_icp_transformation(source, target, trafo, max_iteration=2000):
+ threshold = 0.02
+ trans_init = np.eye(4)
+ trans_init[:3, :4] = np.hstack([trafo[1] * trafo[0], np.expand_dims(trafo[2], axis=0).T])
+
+ print("Initial alignment")
+ evaluation = o3d.pipelines.registration.evaluate_registration(
+ source, target, threshold, trans_init)
+ print(evaluation)
+
+ print("Apply point-to-point ICP")
+ reg_p2p = o3d.pipelines.registration.registration_icp(
+ source, target, threshold, trans_init,
+ o3d.pipelines.registration.TransformationEstimationPointToPlane(),
+ o3d.pipelines.registration.ICPConvergenceCriteria(max_iteration=max_iteration))
+
+ return reg_p2p
+
+
+def manual_registration(pcd_1, pcd_2):
+ """
+ Source: http://www.open3d.org/docs/latest/tutorial/Advanced/interactive_visualization.html
+
+ @param pcd_1:
+ @param pcd_2:
+ @return:
+ """
+
+ def pick_points(pcd):
+ print("")
+ print(
+ "1) Please pick at least three correspondences using [shift + left click]"
+ )
+ print(" Press [shift + right click] to undo point picking")
+ print("2) After picking points, press 'Q' to close the window")
+ viewer = o3d.visualization.VisualizerWithEditing()
+ viewer.create_window(window_name='Picker')
+ opt = viewer.get_render_option()
+ # opt.show_coordinate_frame = True
+ opt.point_size = 2.5
+ viewer.add_geometry(pcd)
+ viewer.run() # user picks points
+ viewer.destroy_window()
+ print("")
+ return viewer.get_picked_points()
+
+ def draw_registration_result(source, target, transformation):
+ source_temp = copy.deepcopy(source)
+ target_temp = copy.deepcopy(target)
+ source_temp.paint_uniform_color([1, 0.706, 0])
+ target_temp.paint_uniform_color([0, 0.651, 0.929])
+ source_temp.transform(transformation)
+ o3d.visualization.draw_geometries([source_temp, target_temp])
+
+ # pick points from two point clouds and builds correspondences
+ picked_id_source = pick_points(pcd_1)
+ picked_id_target = pick_points(pcd_2)
+
+ picked_points_1 = pcd_1.select_by_index(picked_id_source)
+ picked_points_2 = pcd_1.select_by_index(picked_id_target)
+
+ return np.asarray(picked_points_1.points), np.asarray(picked_points_2.points)
diff --git a/aruco_estimator/visualization/__init__.py b/aruco_estimator/visualization/__init__.py
index 96026b5..a2dc54e 100644
--- a/aruco_estimator/visualization/__init__.py
+++ b/aruco_estimator/visualization/__init__.py
@@ -1,5 +1,5 @@
#!/usr/bin/env python
# -*- coding: utf-8 -*-
-from visualization import *
-from visualization_scale_factor_estimator import *
\ No newline at end of file
+from .visualization import *
+from .visualization_scale_factor_estimator import *
\ No newline at end of file
diff --git a/aruco_estimator/visualization/visualization_scale_factor_estimator.py b/aruco_estimator/visualization/visualization_scale_factor_estimator.py
index 73a2268..58c2354 100644
--- a/aruco_estimator/visualization/visualization_scale_factor_estimator.py
+++ b/aruco_estimator/visualization/visualization_scale_factor_estimator.py
@@ -6,17 +6,12 @@
See LICENSE file for more information.
"""
-import open3d as o3d
-import numpy as np
-
-from colmap_wrapper.colmap import COLMAP
-from colmap_wrapper.colmap.colmap_project import PhotogrammetrySoftware
-from colmap_wrapper.visualization import draw_camera_viewport
from aruco_estimator.visualization import *
+from aruco_estimator.aruco_scale_factor import ArucoScaleFactor
class ScaleFactorExtimatorVisualization():
- def __init__(self, photogrammetry_software: PhotogrammetrySoftware):
+ def __init__(self, photogrammetry_software: ArucoScaleFactor):
self.scale_factor_estimator = photogrammetry_software
self.photogrammetry_software = photogrammetry_software.photogrammetry_software
@@ -30,7 +25,7 @@ def show_dense(self):
class ArucoVisualization(ScaleFactorExtimatorVisualization):
- def __init__(self, aruco_colmap: COLMAP, bg_color: np.ndarray = np.asarray([1, 1, 1])):
+ def __init__(self, aruco_colmap: ArucoScaleFactor, bg_color: np.ndarray = np.asarray([1, 1, 1])):
super().__init__(aruco_colmap)
self.vis_bg_color = bg_color
@@ -91,7 +86,6 @@ def add_colmap_frustums2geometrie(self, frustum_scale: float = 1., image_type: s
self.geometries.extend(geometries)
-
def visualization(self, frustum_scale: float = 1, point_size: float = 1., sphere_size: float = 0.02):
"""
@@ -125,7 +119,7 @@ def visualization(self, frustum_scale: float = 1, point_size: float = 1., sphere
color=[[0, 0, 0],
[1, 0, 0],
[0, 0, 1],
- [1, 1, 1]],
+ [1, 1, 0]],
radius=sphere_size)
aruco_rect = generate_line_set(points=[self.scale_factor_estimator.aruco_corners_3d[0],
diff --git a/setup.py b/setup.py
index ad9d2db..876e587 100644
--- a/setup.py
+++ b/setup.py
@@ -16,7 +16,7 @@
setuptools.setup(
name='aruco-estimator',
- version='1.1.8',
+ version='1.1.10',
description='Aruco Scale Factor Estimation',
license="MIT",
long_description=long_description,
@@ -26,10 +26,10 @@
url="https://github.com/meyerls/aruco-estimator",
packages=['aruco_estimator'],
install_requires=["numpy",
- "colmap_wrapper",
+ "colmap_wrapper==1.1.5",
"matplotlib",
"open3d",
- "opencv-contrib-python",
+ "opencv-contrib-python==4.6.0.66",
"pyquaternion",
"pycolmap",
"tqdm",