how to test and run it for a newbie? #64
Comments
|
3 command total started roslaunch server http://leon-desktop:46693/ SUMMARYPARAMETERS
NODES auto-starting new master No. 2 dog display,but I don't know how to control to move, only know control interface. No. 3 PARAMETERS
NODES auto-starting new master setting /run_id to fffe69ea-941c-11eb-b0be-b827eb8897a3
|

|
If spot_micro_motion_cmd in standalone mode, you do not need to run the i2cpwm_board node. I think you need to verify you can exchange communication between your ubuntu virtual machine and the raspberry pi. They must be connected on the same network, or to eachother. You may need to modify network settings in the virtual machine software to get communication with the raspberry pi. First verify you can ping the ip address of the raspberry pi from your ubuntu virtual machine. Find what ip address the raspbery pi has on it's wireless network interface through On the virtual machine try pinging that ip address, example: On your virtual machine you need to make sure you set some environment variables so nodes know the ROS master is on the pi. You may need to set ROS_MASTER_URI and ROS_IP. I have the following in my ~/.bashrc file. You'd have to replace http://ubunturospi.local with the ip address of your raspberry pi. You would also need to set ROS_IP to your virtual machine's ip address. Before trying to run this software, I would make sure you can successfully run a ROS tutorial example, where one node is on the Rapsberry pi, and one node is on the virtual machine. For example, the simple publisher and subscriber: http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29 The following video may help guide you as a basic ros tutorial for running stuff on a raspberr pu: https://www.youtube.com/watch?v=iLiI_IRedhI |
|
Thanks for your reply! The robot should work on only one pi . Maybe more terminal. Then remote node control mode. Or it should be simulate on a ROS and I understand Kinematics. |
|
Hey! I didn't create a new topic. I hope you can help me. [ WARN] [1617730100.302570705]: Joint LF_2, Angle: 37.42 Angle values change. Joint numbers do not change. |
|
Those are the right two commands that should be able to start up the software. Did you modify the configuration at all? This warning means a joint angle beyond the intended travel range was computed for some reason. If the legs are twitching there may inadvertently be another node running trying to command the leg servos. Make sure your not running two instances of anything. You can try running the motion command node on your laptop instead of the pi to see if you get any different result. Lastly, it could be some artifact of running on a rpi4 versus a rpi3. I don't have one to test so I am unsure what impact it may have, though I think others have gotten it working on a rpi4. @liwenz Sorry, I don't really know how to help you anymore. |
|
Here is a screenshot of my table |

|
I reinstall ubuntu mate 16(pi) and vm ubuntu 16 (another pc) roslaunch servo_move_keyboard keyboard_move.launch Should the servo run to min,center,max, or only a config? |
|
roslaunch servo_move_keyboard keyboard_move.launch Which servo to control? Enter a number 1 through 12: 1 |
|
@liwenz you should first verify your VM can communicate with the raspberry pi. For example, try pinging the pi from your VM: Next, try running an example publisher and subscriber in ROS, where one node is running on the raspberry pi and the other on the VM, and see if you can get that to work: http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29 |
|
@AlekseyErmolaev your config values look reasonable, or at least they don't have any obvious errors, but they are very different from my set, which is the default set on this repo. However the values are entirely dependent on the positions a servo is installed. I would double check you followed the calibration directions. Try spot checking a few servos using your calibration table. For example, for the right front lower leg joint (the knee), according to your config table if you command it to a pwm value of 306, will the lower leg link be position truly at 0 degrees? |
|
ping and netccat from pi to vm are ok now. Remote machine topic listed, but no data transmitted |
|
Which topic? |
|
I forgot, maybe turtle_cmd, I check it again. |
|
my test come from: http://wiki.ros.org/ROS/Tutorials/MultipleMachines ssh hal ssh marvin ssh hal it could control the turtle move in one pc or pi rpstopic list work well. leon@leon: |
|
roslaunch servo_move_keyboard keyboard_move.launch roslaunch servo_move_keyboard keyboard_move.launch run_i2cpwm_board: =1 Then I edit the launch file , defualt =true But I can't get signal on pwm. |
|
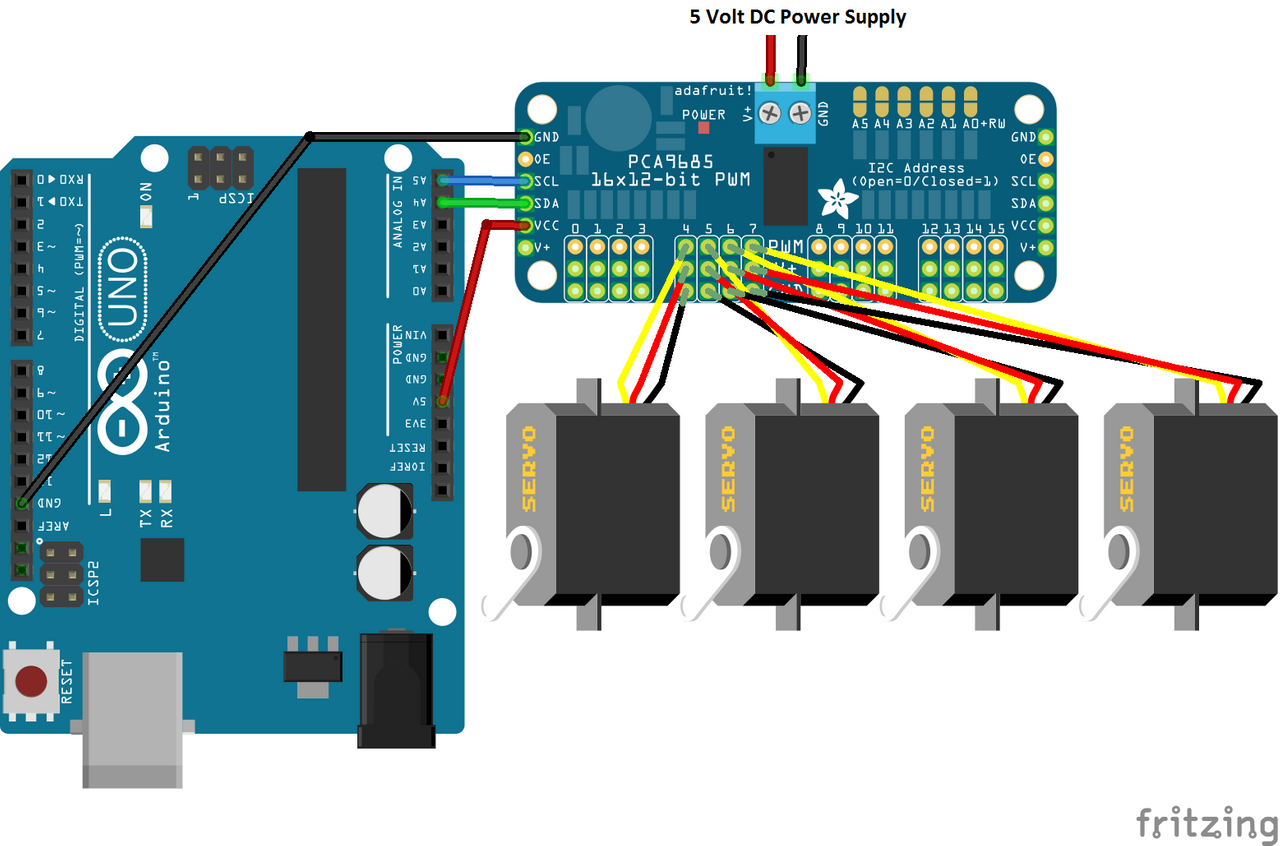
Not sure what to tell you, running your command works for me, specifically: Note, however, the i2c_pwmboard node will only work correctly if run on a raspberry pi with the pwm board installed and with the i2c, power, and ground pins correctly connected. Is your pca9685 board powered correctly?. The board requires power both for the board circuitry, and for the servo power. See the following diagram for example, note the top power input from an external 5v power source. The pi alone probably will not supply enough power to allow the servos to move. |
|
roslaunch servo_move_keyboard keyboard_move.launch run_i2c_pwmboard:=true |
|
Hi, I also have a problem, more. i2cpwm_board display reports error: spot_micro_motion_command reports an error: Although everything is in place, but the different versions without catkin have changed, and no one is able to tell me now how to run it? Thanks for your instructions. There is no arduino in your spot? do you control the rpi servo-shield? I'm trying to find a solution to combine Ros in such a way that it reads and writes everything to UNO just like the Arduino IDE and its SerialMonitor. Any ideas to help?
|

{kind=link}
|
where could I find the geometry data, as leg lenth, the arm coordinate,angle. |
Make sure you can see the pwm board on your RPi. See the following page, section "Testing I2C":
https://learn.adafruit.com/adafruits-raspberry-pi-lesson-4-gpio-setup/configuring-i2c#testing-i2c-2724591-14
For example, running the command like: sudo i2cdetect -y 1
leon@leon-desktop:
$ sudo i2cdetect -y 1$[sudo] password for leon:
Error: Could not open file
/dev/i2c-1' or/dev/i2c/1': No such file or directoryleon@leon-desktop:
Also, you are running the i2cpwmboard on the raspberry pi right? And not on your PC?
pi b3
roslaunch servo_move_keyboard keyboard_move.launch
...
setting /run_id to c3180844-941a-11eb-b0be-b827eb8897a3
process[rosout-1]: started with pid [3482]
started core service [/rosout]
process[servo_move_keyboard_node-2]: started with pid [3485]
[INFO] [1617412834.089777]: > Servos corrrectly initialized
[INFO] [1617412834.107231]: > Publisher corrrectly initialized
[INFO] [1617412834.116593]: Initialization complete
Servo Control Module for 12 Servos.
Enter one of the following options:
quit: stop and quit the program
oneServo: Move one servo manually, all others will be commanded to their center position
allServos: Move all servo's manually together
Keyboard commands for One Servo Control
q y
f g j k
z x b n m
q: Quit current command mode and go back to Option Select
z: Command servo min value
y: Command servo center value
x: Command servo max value
f: Manually decrease servo command value by 10
g: Manually decrease servo command value by 1
j: Manually increase servo command value by 1
k: Manually increase servo command value by 10
b: Save new min command value
n: Save new center command value
m: Save new max command value
anything else : Prompt again for command
CTRL-C to quit
Command?:
I don't know how to choose the server number or load the parameter.
Is there a link?
The text was updated successfully, but these errors were encountered: