UR3 robot in Unity3D did not change joint states as the URSim robot. #5
Comments
|
Hi Roman Parak, I encountered the same problem as mentioned by 2000222. And my situation is exactly the same.
I attached the debug info and some snapshots regarding the issue for your reference. Error 1: ObjectDisposedException System.Net.Sockets.NetworkStream.Write (System.Byte[] buffer, System.Int32 offset, System.Int32 size) (at <0463b2ef957545c0a51b42f372cd4fbb>:0)
ur_data_processing+UR_Control.UR_Control_Thread () (at Assets/Scripts/UR3/ur_data_processing.cs:354)
System.Threading.ThreadHelper.ThreadStart_Context (System.Object state) (at <695d1cc93cca45069c528c15c9fdd749>:0)
System.Threading.ExecutionContext.RunInternal (System.Threading.ExecutionContext executionContext, System.Threading.ContextCallback callback, System.Object state, System.Boolean preserveSyncCtx) (at <695d1cc93cca45069c528c15c9fdd749>:0)
System.Threading.ExecutionContext.Run (System.Threading.ExecutionContext executionContext, System.Threading.ContextCallback callback, System.Object state, System.Boolean preserveSyncCtx) (at <695d1cc93cca45069c528c15c9fdd749>:0)
System.Threading.ExecutionContext.Run (System.Threading.ExecutionContext executionContext, System.Threading.ContextCallback callback, System.Object state) (at <695d1cc93cca45069c528c15c9fdd749>:0)
System.Threading.ThreadHelper.ThreadStart () (at <695d1cc93cca45069c528c15c9fdd749>:0)
UnityEngine.<>c:<RegisterUECatcher>b__0_0(Object, UnhandledExceptionEventArgs)Error 2: SocketException SocketException: A blocking operation was interrupted by a call to WSACancelBlockingCall.
System.Net.Sockets.Socket.Receive (System.Byte[] buffer, System.Int32 offset, System.Int32 size, System.Net.Sockets.SocketFlags socketFlags) (at <0463b2ef957545c0a51b42f372cd4fbb>:0
)
System.Net.Sockets.NetworkStream.Read (System.Byte[] buffer, System.Int32 offset, System.Int32 size) (at <0463b2ef957545c0a51b42f372cd4fbb>:0)
Rethrow as IOException: Unable to read data from the transport connection: A blocking operation was interrupted by a call to WSACancelBlockingCall.I get stuck in these problems for quite some time. Any help from you will be really appreciated!
|






|
Hey (@2000222 , @ZiruiHong ), sorry for the late response, but as always, I'm busy. I have tested the app and everything works properly (simulation only). Since I only have the CB version in my lab, I have not tested the latest UR-e version in real-world. However, I have received a lot of positive feedback that everything works without problems. First of all, If you are using the UR-e version of the robot, you need to change lines 93 and 97 in the C# script. Because the communication rate of the CB-version of the robot I used is 125 Hz (8 milliseconds) and the new one is 500 Hz (2 milliseconds). Just change the time step value from 8 to 2. But I suppose that's not the main problem. You will probably need to enable the remote control. Remote Control option on the UR robot controller if you have a UR-e robot (UR3e, UR5e or UR10e): Note: I hope everything is clear, if not, contact me at: Have a great day. RP |
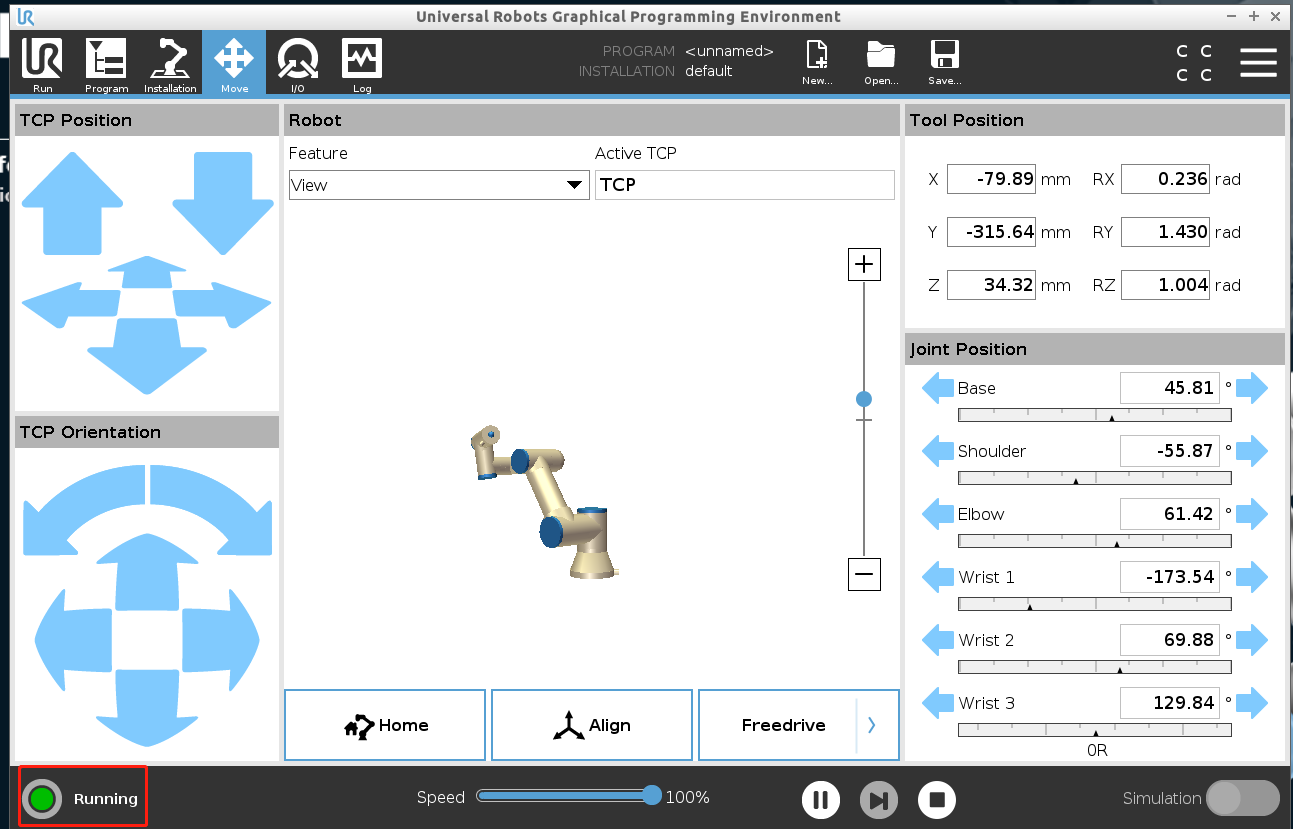
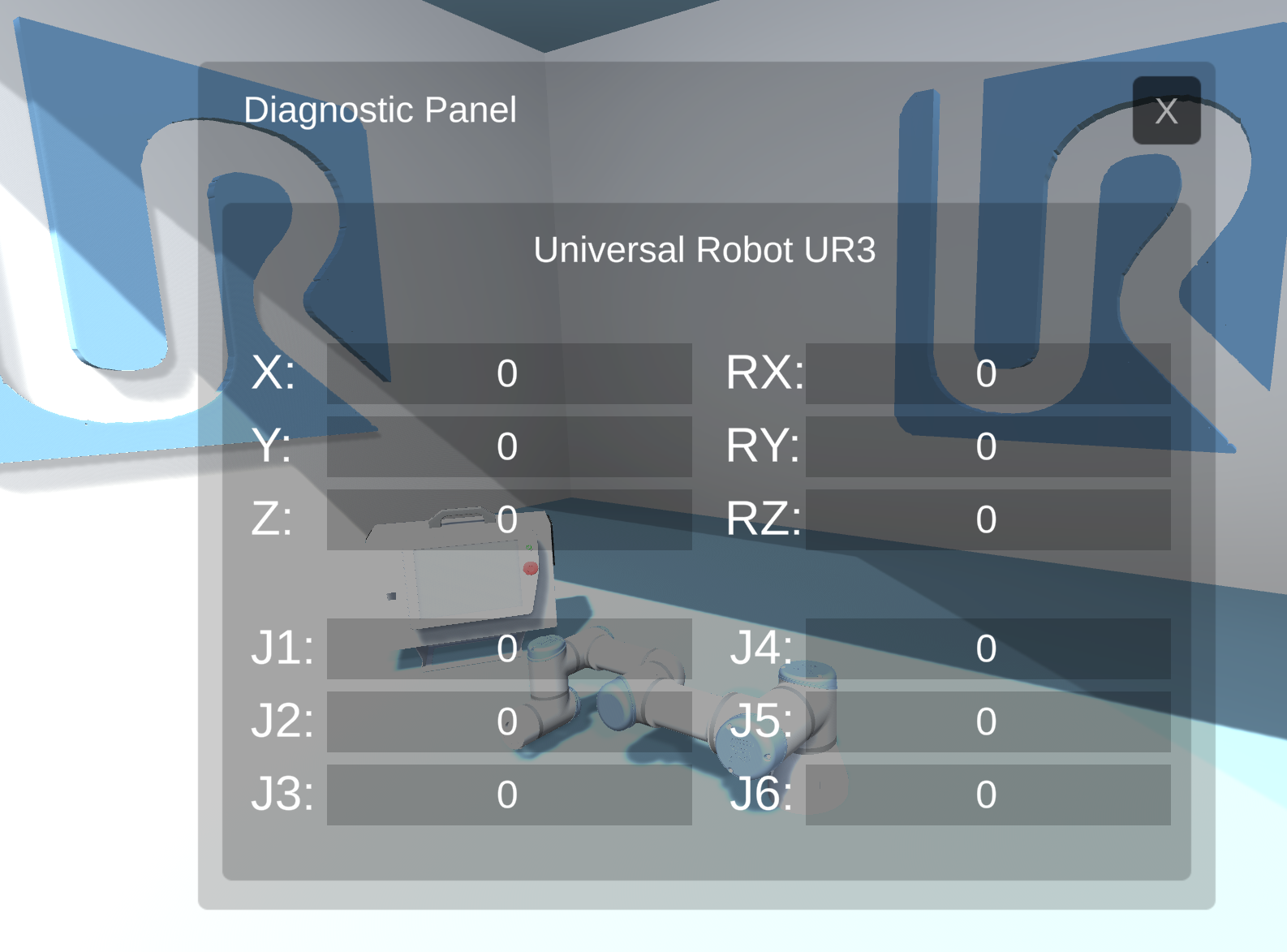
Hello, I've successfully connect the Unity3D with URSim with the IP address and it's possible to utilize the "Joystick Panel" to control URSim robot remotely. But the robot in Unity3D did not change its condition to be the same as that in URSim.
Then when I close the Unity running mode, I obtained the following issue:
How can I fix the problem, thank u very much.
The text was updated successfully, but these errors were encountered: