Evaluating the performance of SLAM (relative positioning) and sensor fusion (absolute positioning) using evo
Python package for the evaluation of odometry and SLAM
| Linux / macOS / Windows / ROS |
|---|
This package provides executables and a small library for handling, evaluating and comparing the trajectory output of odometry and SLAM algorithms.
Supported trajectory formats:
- 'TUM' trajectory files
- 'KITTI' pose files
- 'EuRoC MAV' (.csv groundtruth and TUM trajectory file)
- ROS bagfile with
geometry_msgs/PoseStamped,geometry_msgs/TransformStamped,geometry_msgs/PoseWithCovarianceStampedornav_msgs/Odometrytopics
See here for more infos about the formats.
Installation is easy-peasy if you're familiar with this: https://xkcd.com/1987/#
Python 3.5+ and Python 2.7 are both supported. If you want to use the ROS bagfile interface, first check which Python version is used by your ROS installation and install accordingly. You might also want to use a virtual environment.
If you just want to use the executables of the latest release version, the easiest way is to run:
pip install evo --upgrade --no-binary evoThis will download the package and its dependencies from PyPI and install or upgrade them. Depending on your OS, you might be able to use pip2 or pip3 to specify the Python version you want. Tab completion for Bash terminals is supported via the argcomplete package on most UNIX systems - open a new shell after the installation to use it (without --no-binary evo the tab completion might not be installed properly). If you want, you can subscribe to new releases via https://libraries.io/pypi/evo.
Run this in the repository's base folder:
pip install --editable . --upgrade --no-binary evo- Cannot uninstall 'scipy'. It is a distutils installed project and thus we cannot accurately determine which files belong to it which would lead to only a partial uninstall.
- solutions
sudo pip install --upgrade scipy --ignore-installed six
- solutions
- get error and visualize trajectory
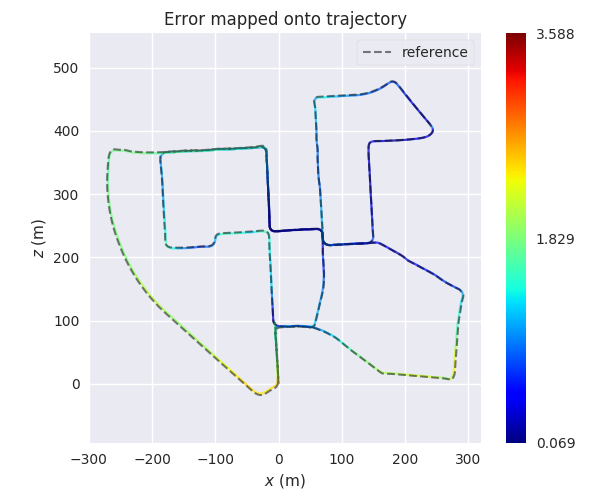
evo_rpe tum groundTruth.csv vio.csv -va --plot --plot_mode xyz // the relative position error between the reference trajactory with others
evo_traj tum groundTruth.csv vio.csv --plot // plot the trajactory of the two .csv data
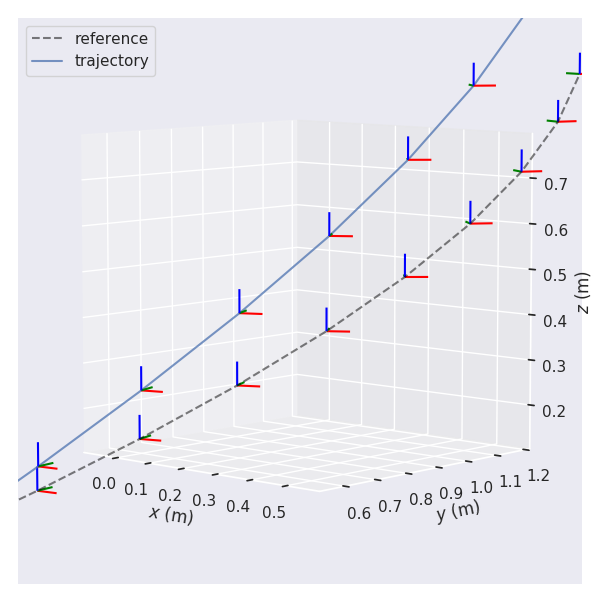
evo_rpe tum groundTruth.csv vio.csv -r angle_deg --delta 1 --delta_unit m -va --plot --plot_mode xyz --save_plot ./VINSplot --save_results ./VINS.zip
evo_traj tum groundTruth.csv vio.csv --plot --save_plot ./VINSplottraj1
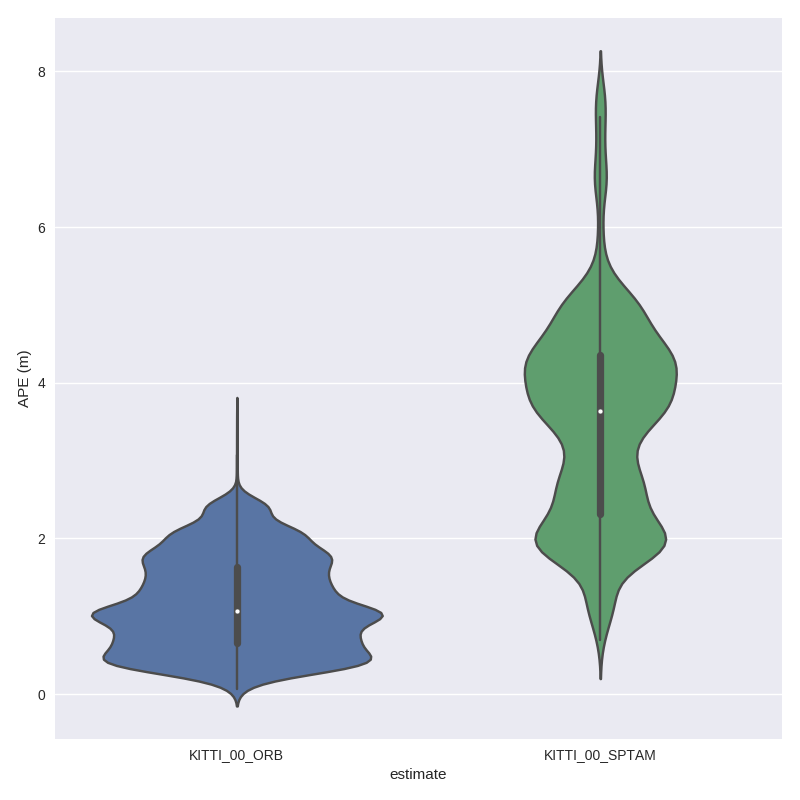
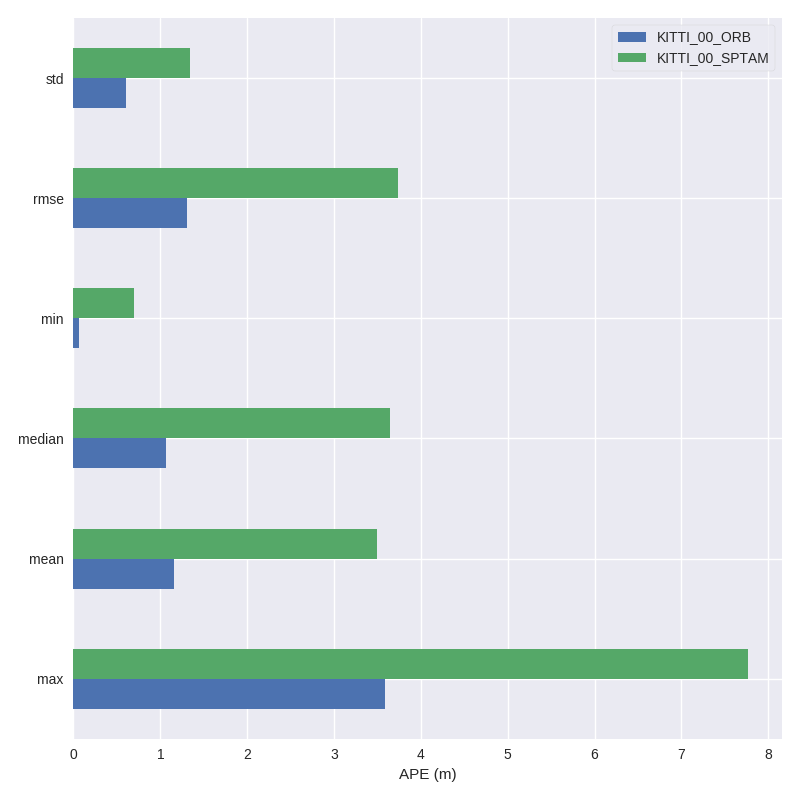
evo_res result079 result063 result058 --use_filenames -p --save_plot ./multipleplot
- Transfer the npz format to csv, typing code in terminal
python
import numpy as np
data = np.load('/home/bxw/remoteSensing2020/src/result/error_array.npz') // change the path to your file
print(data) // the 4th steps, it is just print the data in terminal
np.savetxt("error.csv",data,delimiter=",") //npz to csv file
evo_rpe tum groundTruth.csv vio.csv -va --t_offset 0.0 --plot --plot_mode xyz
evo_config set plot_seaborn_style whitegrid
这是修改背景,其中whitegrid可以替换成darkgrid, whitegrid, dark, white, ticks
evo_config set plot_seaborn_palette bright
这是修改线条,其中bright可以替换成deep, muted, bright, pastel, dark, colorblind
evo_rpe tum groundTruth.csv vio.csv -r angle_deg --plot (google the use of -r angle_deg )
evo_traj tum groundTruth.csv vio.csv --ref groundTruth.csv (google the use of --ref)
This is done by searching the best matching timestamps between the reference and the other trajectories. All trajectories are then reduced to the best matching timestamps. If no matches are found, an error is thrown. The options for this step are:
--t_offset: add a constant timestamp offset (not adding to --ref trajectory) - default: 0.0s
--t_max_diff: maximum timestamp difference for data association - default: 0.01s
If you give a reference trajectory with --ref, you can align the other trajectories to the reference with Umeyama's method:
--align or -a = SE(3) Umeyama alignment (rotation, translation)
--align --correct_scale or -as = Sim(3) Umeyama alignment (rotation, translation, scale)
--correct_scale or -s = scale correction only
- Author: Weisong Wen, PhD Candidate in Hong Kong Polytechnic University.
- Email: weisongwen@weisongwen
- Affiliation: Intelligent Positioning and Navigation Laboratory