-
Notifications
You must be signed in to change notification settings - Fork 47
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
3 changed files
with
36 additions
and
4 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -15,11 +15,25 @@ MultiVehicle simulator (MVSIM) | |
| Lightweight, realistic dynamical simulator for 2D ("2.5D") vehicles and robots. | ||
| It is tailored to analysis of vehicle dynamics, wheel-ground contact forces and accurate simulation of typical robot sensors (e.g. 2D and 3D lidars). | ||
|
|
||
| This package includes C++ libraries, standalone applications, and ROS-1 and ROS-2 nodes. | ||
| This package includes C++ libraries, standalone applications, and ROS 1 and ROS 2 nodes. | ||
|
|
||
| License: 3-clause BSD License | ||
| Copyright (C) 2014-2023 Jose Luis Blanco <[email protected]> (University of Almeria) and collaborators | ||
|
|
||
| Please, refer to [the MVSim paper](https://arxiv.org/abs/2302.11033) for a gentle introduction | ||
| to the project architecture. | ||
| If you want to cite MVSim in your work, please use: | ||
|
|
||
| @misc{mvsim, | ||
| doi = {10.48550/ARXIV.2302.11033}, | ||
| url = {https://arxiv.org/abs/2302.11033}, | ||
| author = {Blanco-Claraco, José-Luis and Tymchenko, Borys and Mañas-Alvarez, Francisco José and Cañadas-Aránega, Fernando and López-Gázquez, Ángel and Moreno, José Carlos}, | ||
| title = {MultiVehicle Simulator (MVSim): lightweight dynamics simulator for multiagents and mobile robotics research}, | ||
| publisher = {arXiv}, | ||
| year = {2023} | ||
| } | ||
|
|
||
|
|
||
|  | ||
|
|
||
| [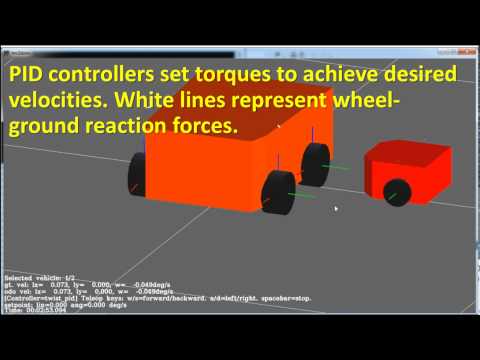](https://www.youtube.com/watch?v=xMUMjEG8xlk) | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters