Note: If you are having trouble running Amalgam, feel free to email me jgarzagu at ucsd.edu
Amalgam Core for translating html soft elements to Physical Web Components (hard elements) using Amalgam-enhanced CSS.
./amalgamNative and ./amalgamAngular both contain a compiler which translates soft elements to hard elements. amalgamNative has hard elements that interface with electrical components made using native web components whereas amalgamAngular has hard elements that use Angular directives for creating components. After the folder is added to the proyect and renamed as amalgam it can them be imported to a proyect:
<link rel="import" href="amalgam/amalgam.html">./examplesNative contains two examples, a Physical Youtube Player and a Physical Dancing Speaker.
Video
 Soft elements are translated into physical components to make a new device.
Soft elements are translated into physical components to make a new device.
 Extra Required CSS:
Extra Required CSS:
#playPause {
hardware: physical-button(gpio:var(--gpio5));
}
#prev {
hardware: physical-button(gpio:var(--gpio6));
}
#next {
hardware: physical-button(gpio:var(--gpio12));
}
#slider {
hardware: physical-pot(i2c-port:url("/dev/i2c-1"), i2c-addr:0x40);
}
#progressBar {
width: 99%;
hardware: physical-motorized-pot(motora:var(--gpio23), motorb:var(--gpio24),
touch:var(--gpio25), i2c-addr:0x48, i2c-port:url("/dev/i2c-1"));
}Video
 HTML and CSS code:
HTML and CSS code:
<link rel="import" href="amalgam/amalgam.html">
...
<button onclick="playPause()" id="playPause"
style="hardware: physical-button( gpio: var(--gpio5) )"> playPause
</button>
<button onclick="prevSong()" id="prev"
style="hardware: physical-button( gpio: var(--gpio6) )"> Prev
</button>
<button onclick="nextSong()" id="next"
style="hardware: physical-button( gpio: var(--gpio12) )"> Next
</button>
<input type="range" min="0" max="1" step="0.1" value="1" id="slider"
style="hardware: physical-pot( adc-channel: 1, i2c-port: url('/dev/i2c-1'),
i2c-addr: 0x48">
<div class="rythm color1"
style="hardware: physical-rgb-led( spi-port: url('/dev/spidev0.0') )">
</div>
<div class="rythm twist1"
style="hardware: physical-servo-motor( servo-channel: 0, i2c-port: url('/dev/i2c-1' ), i2c-addr: 0x48 )">
</div>
<div class="rythm twist2"
style="hardware: physical-servo-motor( servo-channel: 3, i2c-port: url('/dev/i2c-1' ), i2c-addr: 0x40 )">
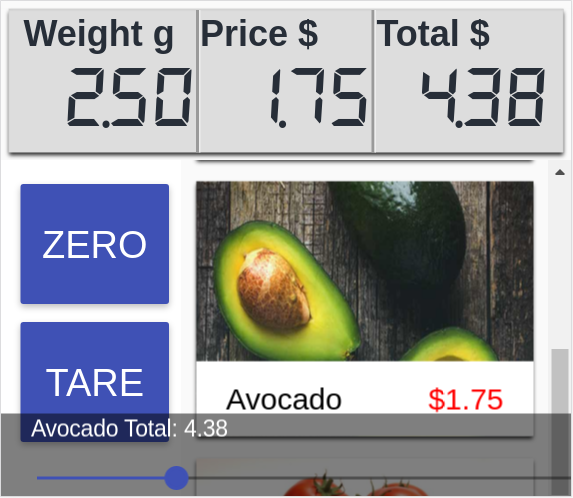
</div> ./examplesAngular contain two different physical versions of a soft weight scale. Here is the soft version and the two versions compared side by side:
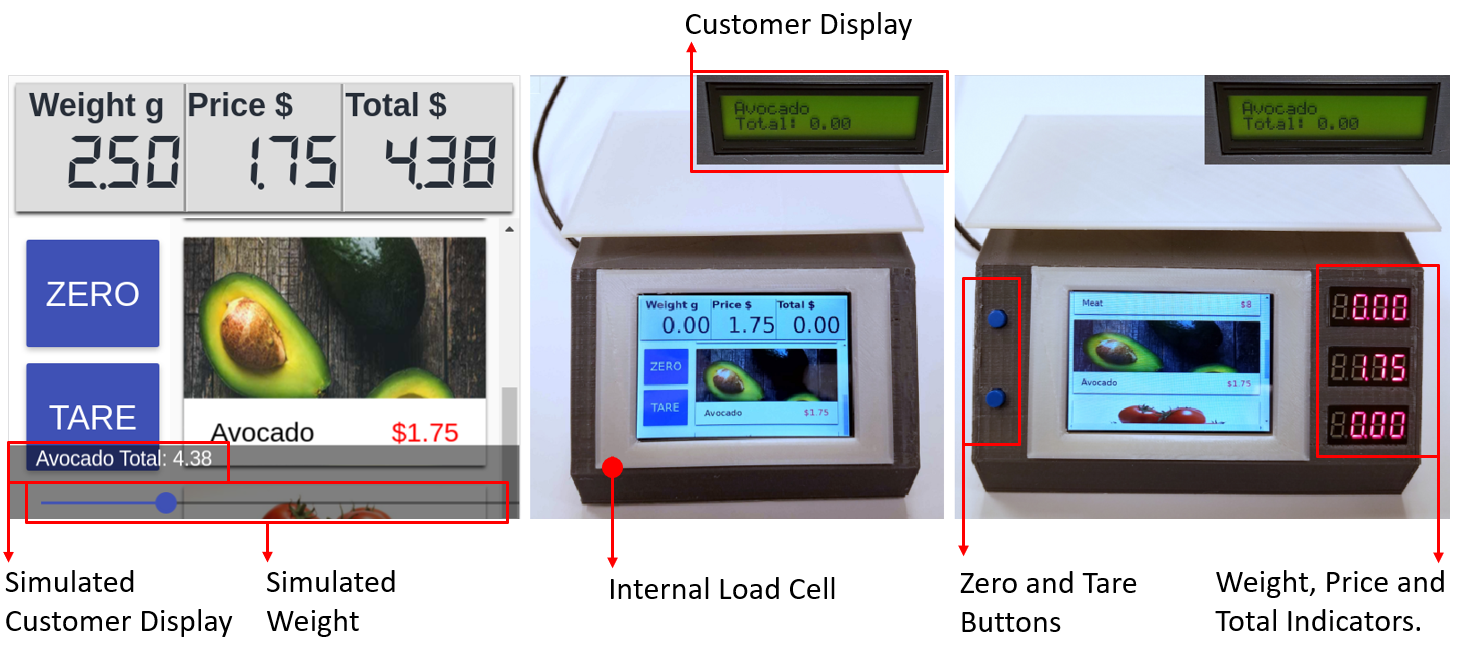
A soft weight scale with a simulated load cell and simulated back text displat
Video
Load cell and back display added


Extra Required CSS:
#lcdDisplay {
hardware: physical-span;
}
#weightSensor {
hardware: physical-weight-sensor;
}*Note: hard elements here use default pin and ports assigments

#lcdDisplay {
hardware: physical-span;
}
#weightSensor {
hardware: physical-weight-sensor;
}
#weightDigits {
hardware: physical-digits(din-gpio:17, cs-gpio:27 clk-gpio:22);
}
#priceDigits {
hardware: physical-digits(din-gpio:5, cs-gpio:6 clk-gpio:13);
}
#totalDigits {
hardware: physical-digits(din-gpio:16, cs-gpio:20 clk-gpio:21);
}
#buttonZero {
hardware: physical-button(gpio:19);
}
#buttonTare {
hardware: physical-button(gpio:26);
}
/*Remove other content */
#scale {
display: none;
}
.container {
display: none;
}
.sidenav {
display: none !important;;
}