how to estimate the relative pose between robots? #2
Comments
|
Hi @lantianran, |
|
Hi@lantianran, where is your dataset? |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
after read your paper , I met a little question.
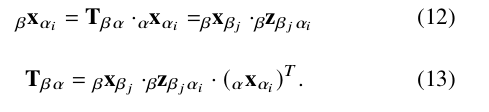
In the paper ,once two robot meet , we can determine a Tab, the equation is :
how can we get the zab under the b Coordinate System?
if we use ICP we can get zab , but it not under any coordinate.
I don't know if I'm right to think this way, hope to get your help
@yeweihuang @jinkunw
The text was updated successfully, but these errors were encountered: