Accesible setup of enviro boards on a Raspberry Pi. The enviro boards can monitor:
- temperature
- humidity
- light
- proximity
- sound (ADC)
Note: we still need to calibrate these sensors!
This reposity consists of:
- main.py: A basic python script to send enviro sensor data through OSC
- BioDataKitActor.py: A Gazebosc Actor to send enviro sensor data
- BioDataKit.gzs: An example Gazebosc stage
- GoogleSheetActor.py: A Gazebosc Actor to send OSC data to a google sheet

Follow the instructions from Pi Moroni to prep your RPI.
From the repo:
pip install -r requirements.txt
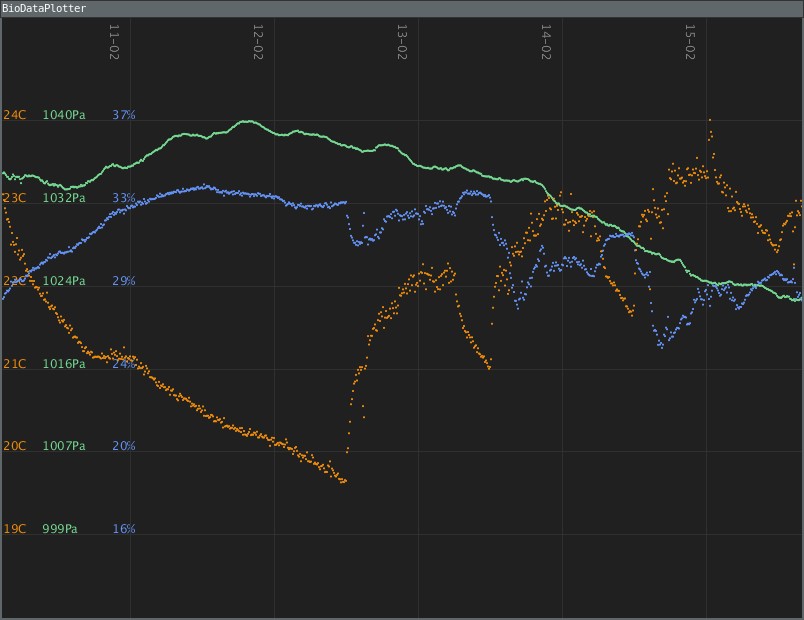
python3 main.pyA simple Processing sketch is included which visualises the CSV data downloaded from a google sheet.
Make sure to install Raspberry Pi OS (Not Raspbian). As of writing 2022-09-22-raspios-bullseye-armhf. When booting follow the onscreen setup:
- Keyboard Layout: Select the right keyboard (
US with EURO on 5) - Create the default user
When the PI has booted login and issue the following command:
sudo raspi-configIn this program set the following options
- System options – hostname: set a sane hostname!
- Interface options – SSH: enable ssh
- Localisation options – Locale:
- select en_IE.UTF-8 UTF-8, deselect any other
- Set en_IE.UTF-8 UTF-8 as default
- Localisation options – Timezone: Select Europe - Amsterdam
Before installing the software make sure to physically install the enviro board with the power off.
First prepare the RPI for the hardware by issuing the following commands:
sudo raspi-config nonint do_i2c 0
sudo raspi-config nonint do_spi 0sudo apt install python3-numpy python3-smbus python3-pil python3-setuptools python3-pip gitFinally install the enviro python libraries:
sudo python3 -m pip install enviroplusWe will be using git to acquire the software. Create a directory where you want the sources to reside, ie ~/src/ and change to the dir
mkdir ~/src
cd ~/srcWe will now clone the software repository
git clone https://github.com/hku-ect/BioDataKit.git
cd BioDataKitIf all went well we can now test the sensor board using python3:
pip3 install -r requirements.txt
python3 main.pyWe don't ship prebuild binaries for the raspberry pi yet. So we need to build from source. Just follow the following script:
sudo apt install git libtool-bin libdrm-dev libgbm-dev build-essential libtool-bin cmake \
pkg-config autotools-dev autoconf automake libevdev2 libgles2-mesa-dev \
uuid-dev libpcre3-dev libsodium-dev python3-dev libasound2-dev libxext-dev
cd ~/src
git clone https://github.com/zeromq/libzmq.git
cd libzmq
./autogen.sh && ./configure --without-documentation
make
sudo make install
cd ..
git clone --recurse-submodules http://github.com/hku-ect/gazebosc.git
mkdir gazebosc/build
cd gazebosc/build
cmake .. -DWITH_OPENVR=OFF
CFLAGS=-mfpu=neon makeWe now have gazebosc in the gazebosc/build/bin directory. We can execute from there. For example to run the BioDataKit stage run:
~/src/gazebosc/build/bin/gazebosc ~/src/BioDataKit/BioDataKit.gzs
Create the /etc/systemd/system/gazebosc.service file:
[Unit]
Description=GazebOSC
After=multi-user.target
[Service]
# Uncomment and edit these if you want to use a vitrual env
#Environment="VIRTUAL_ENV=/home/ect/src/BioDataKit/pyenv"
#Environment="PATH=/home/ect/src/BioDataKit/pyenv/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/local/games:/usr/games"
# Edit these paths to match your setup
WorkingDirectory=/home/ect/src/BioDataKit
ExecStart=/home/ect/src/gazebosc/build/bin/gazebosc BioDataKit.gzs
[Install]
WantedBy=multi-user.target
Install and enable with:
sudo systemctl daemon-reload
sudo systemctl enable gazebosc
sudo systemctl start gazebosc