- Travis CI:
- ROS build farm:
- git master:
- ROS Kinetic @ u16.04 Xenial
- ROS Melodic @ u18.04 Bionic
- ROS Kinetic @ u16.04 Xenial
- Last released version:
- ROS Melodic @ u18.04 Bionic:
- ROS Kinetic @ u16.04 Xenial:
- ROS Melodic @ u18.04 Bionic:
- git master:

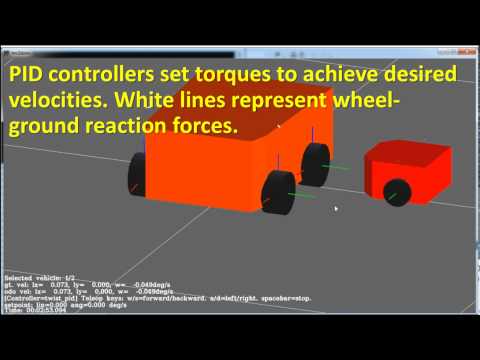
Lightweight, realistic dynamical simulator for 2D ("2.5D") vehicles and robots. It is tailored to analysis of vehicle dynamics, wheel-ground contact forces and accurate simulation of typical robot sensors (e.g. laser scanners).
This package includes the C++ library mvsim, a standalone app and a ROS node.
License: GNU General Public License version 3 Copyright (C) 2017 Jose Luis Blanco [email protected] (University of Almeria) and collaborators
- The mvsim manual is the main reference document can be found in docs/user_manual.tex.
- (TO-DO) ROS tutorials (Write me!!)
- http://wiki.ros.org/mvsim
- Lightweight in memory, CPU and library requirements.
- Fully configurable via
.xml"world" files. - World maps:
- Occupancy gridmaps: input as images or MRPT binary maps (from icp-slam, rbpf-slam, etc.)
- Elevation meshes.
- Vehicle models:
- Differential driven (2 & 4 wheel drive).
- Ackermann steering (kinematic & dynamic steering, different mechanical drive models).
- Ackermann steering with mechanical differentials of full grade.
- Sensors:
- Laser scanners: Robots see each other, their own bodies, etc.
- Interface to vehicles: Choose among:
- Raw access to forces and motor torques.
- Twist commands (using internal controllers).
Requisites:
- A decent C++ compiler!
- CMake >= 3.1
- MRPT (>=1.5.4 from 1.5 series; or >=2.0.0): In Windows, build from sources or install precompiled binaries.
- Box2D: Will use an embedded copy if no system version is found.
In Ubuntu, this will install all requirements:
sudo apt-get install libmrpt-dev libbox2d-dev
-
Install: sudo apt-get install ros-$ROS_DISTRO-mvsim
-
Build: clone to your catkin workspace and build as usual
-
Usage: See docs and tutorials in http://wiki.ros.org/mvsim
This package is already included in OpenMORA.