The aruco_markers package is a compact Python toolkit designed to manage ArUCo markers.
It serves as a streamlined interface for the OpenCV aruco module and offers a range of capabilities through both a command line interface and a simplified library interface.
For more information, refer to the accompanying documentation.
- Code: https://github.com/cmower/aruco_markers
- Documentation: https://cmower.github.io/aruco_markers/
- PyPI: https://pypi.org/project/aruco-markers/
- Issues: https://github.com/cmower/aruco_markers/issues
pip install aruco_markers
In a new terminal:
- Clone repository:
- (ssh)
$ git clone [email protected]:cmower/aruco_markers.git, or - (https)
$ git clone https://github.com/cmower/aruco_markers.git
- (ssh)
- Change directory:
$ cd aruco_markers - Ensure
pipis up-to-date:$ python -m pip install --upgrade pip - Install from source:
$ pip install .
All the functionality of the library can be accessed via
import aruco_markersFull documentation for all the classes/functions provided can be found here.
Several features of the library are exposed to the command line via the aruco command.
When running these commands, several directories will be created.
The top level directory is ~/aruco_markers_data.
All the data created by these commands are stored here, specified in the following sub-sections.
The available commands are
collect: Collect data with checkerboard to calibrate a camera.calibrate: Calibrate a camera.generate: Generate marker tags.detect: Detect marker poses from camera feed.server: Start a camera server.
The use of these commands are described below.
In addition, you can access the documentation for ecah command by appending --help.
For example
$ aruco generate --help
usage: aruco generate [OPTIONS]
Generate marker tags.
optional arguments:
-h, --help Show this help message and exit.
-d DICT, --dict DICT The dictionary for the ArUCo marker. The default is 'DICT_ARUCO_ORIGINAL'.
-i ID, --id ID Identifier of the marker. It has to be a valid id in the specified dictionary. The default is '100'.
-s SIDEPIXELS, --sidepixels SIDEPIXELS
Size of the ArUCo tag. The default is '200'.
-w WIDTH, --width WIDTH
Width of the marker in millimeters. The default is '50'.
-p PAD, --pad PAD Padding around marker in millimeters. The image is positioned on an A4 pdf. The default is '20'.
-l LABEL, --label LABEL
Add an optional label to the marker. The default is ''.
--noshow Display the marker. If unspecified the tag is shown.
--save Save the marker. Tags are saved in ~/aruco_markers/tags; this directory is created when it does not already exist.
--addhalfmarks Add marks at the half-way marks on the pdf. If unspecified no marks are added.
Similarly for each of the other commands.
You can generate markers using the aruco generate command.
When the --save flag is included in the command line input, the marker data is saved in the ~/aruco_markers_data/tags directory.
Two files are created, an image of the marker as a PNG and a printable PDF.
The PDF includes the tag and meta information as human-readable text.
For example, try running
$ aruco generate --dict DICT_ARUCO_ORIGINAL --id 100 --save --noshow
The expected output is as follows (note HOMEDIR will be relaced with what ever your home directory is set as).
Created HOMEDIR/aruco_markers_data
Created HOMEDIR/aruco_markers_data/tags
Saved
HOMEDIR/aruco_markers_data/tags/marker_dict_DICT_ARUCO_ORIGINAL_id_100_sidepixels_200_borderbits_1_width_500_pad_20.png
HOMEDIR/aruco_markers_data/tags/marker_dict_DICT_ARUCO_ORIGINAL_id_100_sidepixels_200_borderbits_1_width_500_pad_20.pdf
Note, if you have already run aruco generate before, then it is possible you will not see the lines acknowledging a directories creation (i.e. those starting with Created).
The PNG file created should match the marker displayed at the top of this readme, i.e. here.
{kind=link}
The full list of available dictionaries are as follows.
- DICT_4X4_50
- DICT_4X4_100
- DICT_4X4_250
- DICT_4X4_1000
- DICT_5X5_50
- DICT_5X5_100
- DICT_5X5_250
- DICT_5X5_1000
- DICT_6X6_50
- DICT_6X6_100
- DICT_6X6_250
- DICT_6X6_1000
- DICT_7X7_50
- DICT_7X7_100
- DICT_7X7_250
- DICT_7X7_1000
- DICT_ARUCO_ORIGINAL
- DICT_APRILTAG_16h5
- DICT_APRILTAG_25h9
- DICT_APRILTAG_36h10
- DICT_APRILTAG_36h11
When creating markers, it's often the case you want to affix the printed marker onto an object.
In such cases, knowing the mid-points of the rectangle is helpful, as manual measurements can be inaccurate.
To simplify this process, you can use the --addhalfmarks flag in the aruco generate command while generating markers.
The following is an example of how the output would look like when running this command.
Calibrating a camera can be performed using the aruco collect and aruco calibrate command.
Running this command will take you through several steps in order to calibrate the camera.
You will require a checkerboard to complete the calibration process. A good resource for getting printable checkerboards can be found here. It is a good idea to attach the printed checkerboard to a flat surface.
You can also find a checkerboard in the doc/ directory called Checkerboard-A4-25mm-8x6.pdf.
This is a 8-by-6 checkerboard, where each square has length 25mm when printed on A4.

To gather data for calibration, execute the aruco collect command.
When the checkerboard is detected correctly, a result similar to the one depicted in the above figure should appear.
Press the ESC key to stop collecting data.
To obtain accurate estimated parameters from the calibration process, it is advisable to move the checkerboard to different depths and orientations on the screen. Keep in mind that a considerable amount of data could be collected, so make sure that your PC has sufficient storage capacity. The quantity of data required is uncertain, but collecting more data will generally result in more precise estimated parameters. Nevertheless, processing more data will take more time. Ensuring sufficient coverage of depths and orientations is important.
In this particular example, I used the Checkerboard-A4-25mm-8x6.pdf found in the doc/ directory for the checkerboard.
Since I am using my laptop's webcam, the camera index is 0 (which is the default value).
I began the data collection process by executing the following command.
$ aruco collect --width 8 --height 6 --squaresize 25
Run $ aruco collect --help if you need more clarity on the command line input variables.
You should expect terminal output similar to the following.
$ aruco collect --width 8 --height 6 --squaresize 25
Press ESC to quit.
Created HOMEDIR/aruco_markers_data
Created HOMEDIR/aruco_markers_data/calibrate
Created HOMEDIR/aruco_markers_data/calibrate/CAMERANAME
Data collection completed for the 'CAMERANAME' camera.
Data saved in HOMEDIR/aruco_markers_data/calibrate/CAMERANAME
In the above, HOMEDIR is your home directory, i.e. where ever ~/ is on you PC, and CAMERANAME is the camera name used for data collection.
This should correspond to the camera you intend to calibrate (if you have more than one camera attached to your PC).
Note the CAMERANAME, it will be required in the calibration step next.
All the raw images that contain the checkerboard are collected into a zip file called data.zip.
You can run the collection process several times, and the new data is appended to the zip file (the collection does not overwrite previously collected data).
Once you have collected data (as described in the previous section), you can directly perform the calibration.
All you require is the name of the camera (this was ouput to the terminal during the data collection, see CAMERANAME in previous section).
In my example, I ran the following.
$ aruco calibrate --cameraname CAMERANAME
The terminal output should look similar to the following.
$ aruco calibrate --cameraname CAMERANAME
Processing checkerboard images ...
Loaded (1/60) checkerboard_cameraname_CAMERANAME_width_8_height_6_squaresize_25.0_stamp_UNIQUETIMESTAMP.png
Processing ... success!
...
Loaded (60/60) checkerboard_cameraname_CAMERANAME_width_8_height_6_squaresize_25.0_stamp_UNIQUETIMESTAMP.png
Processing ... success!
Done!
Calibrating camera ... done!
Calibration took 1.0067 seconds
Camera matrix:
[[617.49438628 0. 318.25186084]
[ 0. 617.0481798 263.17630606]
[ 0. 0. 1. ]]
Distorion Cooeficients:
[[-3.22848626e-01 2.43430897e+00 -2.73404118e-04 3.06017375e-03
-7.64518705e+00]]
Saved HOMEDIR/aruco_markers_data/calibrate/CAMERANAME/camera_parameters.dat
Completed calibration successfully.
In the above, 60 files were successfully processed.
Note, each file name is given a unique time stamp so files are not overwritten.
The duration of the calibration process is reported and also the estimated parameters.
You do not need to note these since they are saved in the camera_parameters.dat file.
If you have a lot of data and the processing is taking too long, you can downsample the data by specifying the --maxfiles MAXFILES flag.
This will randomly sample MAXFILES files from the file names (uniform distribution) and then perform the calibration.
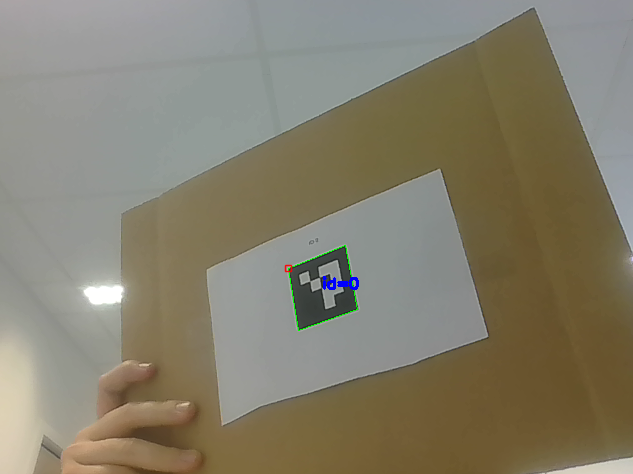
After calibrating a camera, you can use the aruco detect command to display the position of a marker.
This function is primarily intended for debugging and serves as a demonstration of detector configuration.
However, if the camera has not been calibrated beforehand, this command will throw an error.
When you run aruco detect you should see something similar to the figure above.
I ran this example by running the following in terminal.
$ aruco detect --dict DICT_4X4_50 --markerindex 0
Note, the marker I use in this example has a length of 5cm. This information is required if you want to use the pose estimation.
You can run a server that will broadcast images to a UDP network. Simply run the following
$ aruco server
Several listeners can recieve the feeds from this server. The information flow is as follows.
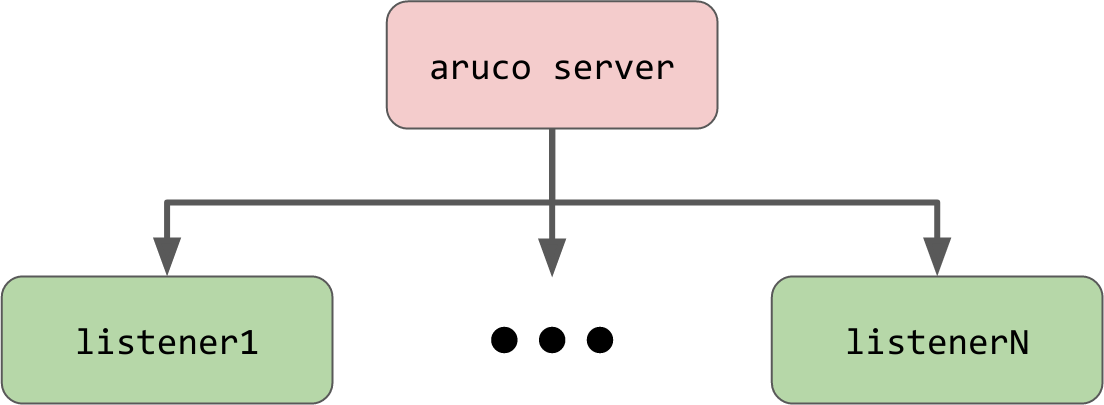
To see this in action try running the example script example/server_listener.py. Note, this script can be run multiple times in separate terminals.
If you opt for the aruco_markers package, you can use the command line interface to produce tags and calibrate cameras.
However, if you require additional features, you can customize the class/method structure available in the library.
Several methods are provided to that enable you to easily load camera parameters, and estimate marker poses.
Please see the examples, that show how to implement a simple pose estimator into ROS 1/ROS 2.
This example assumes you have calibrated your camera by running aruco collect, and aruco calibrate prior to running this script.
The documentation is hosted here. However, if you would like to build the documentation yourself, follow these steps.
In a new terminal:
- Clone repository:
- (ssh)
$ git clone [email protected]:cmower/aruco_markers.git, or - (https)
$ git clone https://github.com/cmower/aruco_markers.git
- (ssh)
- Change directory:
$ cd aruco_markers/doc - Generate the main page:
$ python gen_mainpage.py - Install doxygen:
$ sudo apt install doxygen - Build documentation:
$ doxygen - View documentation:
- In a browser, open
html/index.html - Build pdf (requires LaTeX)
$ cd latex$ make- Open the file called
refman.pdf
- In a browser, open
Generally, any camera that is accessible by the OpenCV VideoCapture class is supported.
Others include
- The ZED-Mini RGBD camera.
If you use aruco_markers in your work, please consider citing the following.
@software{Mower2023
title = "aruco_markers: A Compact Python Package for handling ArUCo markers",
author = "Christopher E. Mower",
year = "2023",
url = {https://github.com/cmower/aruco_markers},
}If you have any issues with the library, or find inaccuracies in the documentation please raise an issue. I am happy to consider new features if you fork the library and submit a pull request.