-
Notifications
You must be signed in to change notification settings - Fork 552
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge branch 'develop' into binary-ply-files
- Loading branch information
Showing
13 changed files
with
52 additions
and
51 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -30,7 +30,7 @@ The library is written in C++ for efficiency with [bindings in Python](doc/index | |
| | ||
| [](https://github.com/ahundt/awesome-robotics#point-clouds) | ||
| <br> | ||
| <sup> | ||
| <sup> | ||
| | ||
| <a href="https://github.com/szenergy/awesome-lidar#basic-matching-algorithms">LIDAR</a> | ||
| | ||
|
|
@@ -48,9 +48,9 @@ The library is written in C++ for efficiency with [bindings in Python](doc/index | |
|
|
||
| ### Supported OS And Architecture | ||
| _libpointmatcher_ is tested on our build system under the following architecture and OS: | ||
| - Ubuntu bionic (18.04), focal (20.04) and jammy (22.04) | ||
| - Ubuntu bionic (18.04), focal (20.04) and jammy (22.04) | ||
| - x86 and arm64/v8 | ||
|
|
||
| Note: | ||
| - _libpointmatcher_ reportedly works on MacOs OsX (latest) and Windows (latest) | ||
|
|
||
|
|
@@ -66,7 +66,7 @@ Execute the following to clone the repository with its submodule: | |
| ```shell | ||
| git clone --recurse-submodules https://github.com/norlab-ulaval/libpointmatcher.git | ||
| ``` | ||
| If _libpointmatcher_ was previously cloned, execute the following to fetch its new submodule | ||
| If _libpointmatcher_ was previously cloned, execute the following to fetch its new submodule | ||
| ```shell | ||
| git submodule update --remote --recursive --init | ||
| ``` | ||
|
|
@@ -79,12 +79,12 @@ on your workstation to speed up your local development workflow. | |
|
|
||
| [//]: # (====Body=================================================================================) | ||
| # Documentation and Tutorials | ||
|
|
||
| **Quick link for the tutorial pages: [Tutorials](http://libpointmatcher.readthedocs.org/). | ||
|
|
||
| Those tutorials are written using Markdown syntax and stored in the project's `/doc` folder. Their scope ranges from introductory material on performing point cloud registration to instructions for the more experienced developer on how to extend the library's codebase. | ||
| Those tutorials are written using Markdown syntax and stored in the project's `/doc` folder. Their scope ranges from introductory material on performing point cloud registration to instructions for the more experienced developer on how to extend the library's codebase. | ||
|
|
||
| Libpointmatcher's source code is fully documented based on doxygen to provide an easy API to developers. An example of this API can be found [here](https://norlab.ulaval.ca/libpointmatcher-doc/), but it is suggested to use the one build for your version in `doc/html`. | ||
| Libpointmatcher's source code is fully documented based on doxygen to provide an easy API to developers. An example of this API can be found [here](https://norlab.ulaval.ca/libpointmatcher-doc/), but it is suggested to use the one build for your version in `doc/html`. | ||
|
|
||
| libpointmatcher was orginaly developed by [François Pomerleau](mailto:[email protected]) and [Stéphane Magnenat](http://stephane.magnenat.net) as part of our work at [ASL-ETH](http://www.asl.ethz.ch). | ||
| It is now maintained by the Northern Robotics Laboratory ([Norlab](https://norlab.ulaval.ca/)), led by François Pomerleau. | ||
|
|
@@ -102,7 +102,7 @@ The library has a light dependency list: | |
| * [Eigen] version 3, a modern C++ matrix and linear-algebra library, | ||
| * [boost] version 1.48 and up, portable C++ source libraries, | ||
| * [libnabo] version 1.0.7, a fast K Nearest Neighbour library for low-dimensional spaces, | ||
|
|
||
| and was compiled on: | ||
| * Ubuntu ([see how](/doc/CompilationUbuntu.md)) | ||
| * Mac OS X ([see how](/doc/CompilationMac.md)) | ||
|
|
@@ -131,9 +131,9 @@ bash lpm_install_docker_tools.bash | |
| ``` | ||
|
|
||
|
|
||
| ### Compilation & Installation | ||
| ### Compilation & Installation | ||
|
|
||
| For beginner users unfamiliar with compiling and installing a library in Linux, go [here](doc/CompilationUbuntu.md) for detailed instructions on compiling libpointmatcher from the source code. | ||
| For beginner users unfamiliar with compiling and installing a library in Linux, go [here](doc/CompilationUbuntu.md) for detailed instructions on compiling libpointmatcher from the source code. | ||
|
|
||
| For conveniences, you can use the provided installer script for ubuntu | ||
| ```shell | ||
|
|
@@ -214,7 +214,7 @@ and/or | |
|
|
||
| If you are interested in learning more about different registration algorithms, we recently put together a literature review surveying multiple solutions. The review is organized in the same way as the library and many examples are provided based on real deployments. | ||
|
|
||
| F. Pomerleau, F. Colas and R. Siegwart (2015), "_A Review of Point Cloud Registration Algorithms for Mobile Robotics_", __Foundations and Trends® in Robotics__: Vol. 4: No. 1, pp 1-104. https://doi.org/10.1561/2300000035 | ||
| F. Pomerleau, F. Colas and R. Siegwart (2015), "_A Review of Point Cloud Registration Algorithms for Mobile Robotics_", __Foundations and Trends® in Robotics__: Vol. 4: No. 1, pp 1-104. https://doi.org/10.1561/2300000035 | ||
|
|
||
| If you don't have access to the journal, you can download it from [here](https://www.researchgate.net/publication/277558596_A_Review_of_Point_Cloud_Registration_Algorithms_for_Mobile_Robotics). | ||
|
|
||
|
|
@@ -226,7 +226,7 @@ We also produced those freely available data sets to test different registration | |
|
|
||
| 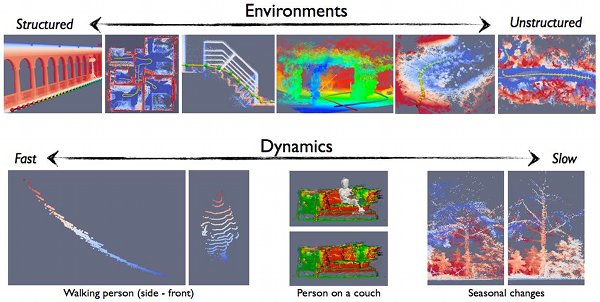 | ||
|
|
||
| You can download the files in CSV or VTK formats, which are directly supported by the library I/O module. | ||
| You can download the files in CSV or VTK formats, which are directly supported by the library I/O module. | ||
|
|
||
|
|
||
| # Projects and Partners | ||
|
|
@@ -241,7 +241,8 @@ If you are using libpointmatcher in your project and you would like to have it l | |
| * [Norlab](https://norlab.ulaval.ca/) is maintaining and using the library for its research on autonomous navigation in harsh environments. | ||
| * [ANYbotics AG](https://www.anybotics.com) is investigating autonomous navigation algorithms using this library. | ||
| * [Point Laz Mining LiDAR Expert](https://www.pointlaz.com/) is scanning mine shafts to ensure infrastructure safety. | ||
|
|
||
| * [Point Laz Mining LiDAR Expert](https://www.pointlaz.com/) is scanning mine shafts to ensure infrastructure safety. | ||
| * [DREAM lab](https://dream.georgiatech-metz.fr/research/woodseer/) use libpointmatcher to reconstruct wood logs in 3D. | ||
| For a larger list of work realized with libpointmatcher, please see the page [Applications And Publications](/doc/ApplicationsAndPub.md). | ||
|
|
||
|
|
||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
File renamed without changes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -2,6 +2,8 @@ ARG PROJECT_HUB=norlabulaval | |
| ARG BASE_IMAGE=libpointmatcher-dependencies | ||
| ARG BASE_IMAGE_TAG | ||
| FROM ${PROJECT_HUB}/${BASE_IMAGE}:${BASE_IMAGE_TAG:?err} AS libpointmatcher-dependencies | ||
| ARG TARGETPLATFORM | ||
| ARG TARGETARCH | ||
|
|
||
| LABEL org.opencontainers.image.authors="[email protected]" | ||
|
|
||
|
|
@@ -40,14 +42,13 @@ WORKDIR "${NBS_LIB_INSTALL_PATH}/${NBS_REPOSITORY_NAME}" | |
| RUN chmod +x ./utest/listVersionsUbuntu.sh | ||
| RUN utest/listVersionsUbuntu.sh | ||
|
|
||
| # ==== Build libpointmatcher checkout branch ====================================================== | ||
| # ==== Build/test libpointmatcher checkout branch ================================================= | ||
| WORKDIR ./build_system/ubuntu | ||
|
|
||
| RUN chmod +x lpm_install_libpointmatcher_ubuntu.bash | ||
| RUN chmod +x lpm_execute_libpointmatcher_unittest.bash | ||
| RUN chmod +x entrypoint.bash | ||
|
|
||
|
|
||
| RUN bash lpm_install_libpointmatcher_ubuntu.bash \ | ||
| --repository-version ${REPOSITORY_VERSION} \ | ||
| --cmake-build-type ${CMAKE_BUILD_TYPE} \ | ||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters