OSX/Linux:

Gazebosc is a high level actor model programming environment. You can visually create actors and author them using a nodal UI. Actors are running concurrently and can be programmed sequentially using C, C++ or Python. Actors communicate using the OSC serialisation format.
CI tested binaries with bundled Python are available from:
https://pong.hku.nl/~buildbot/gazebosc/
Sort on date to find the latest build.
Easiest method of adding a new actor is using Python. You'll need to have a Gazebosc build with Python. Otherwise you can create Actors in C or C++.
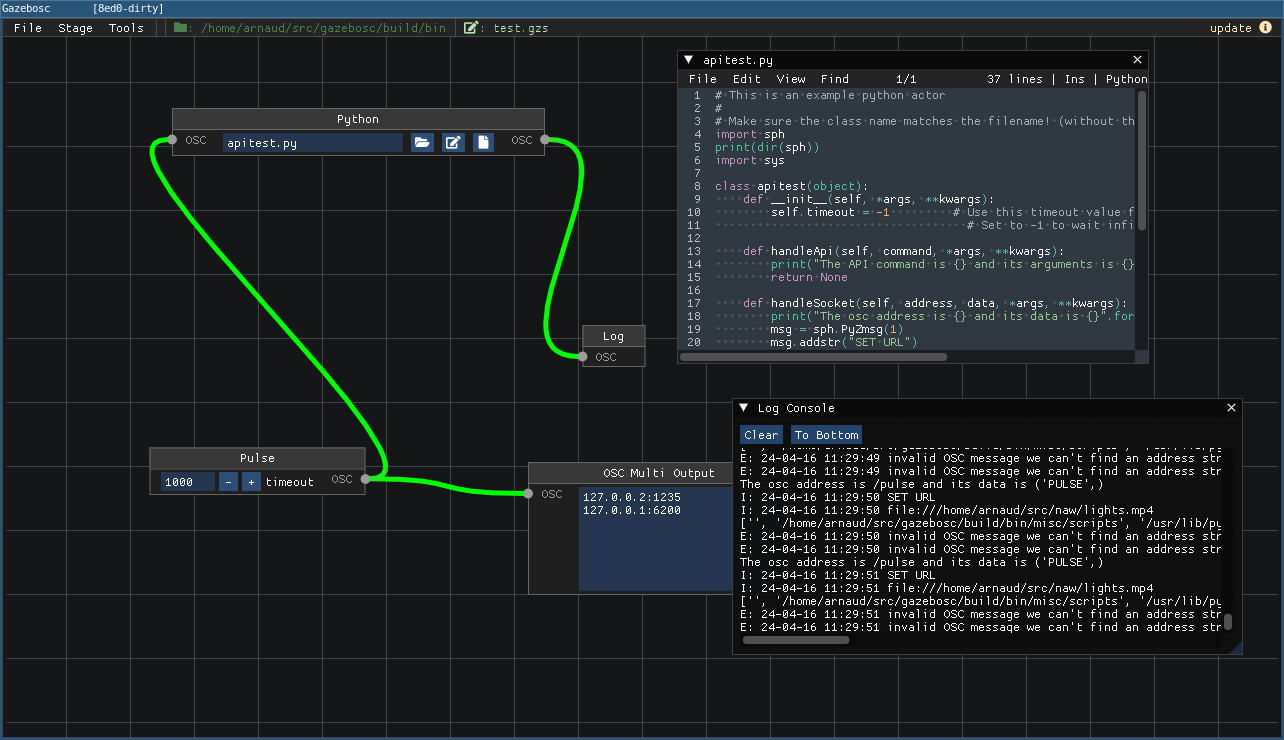
- In Gazebosc create a new Python actor: (right mouse click - Python)
- Click on the edit icon, a text editor will appear
- Paste the following text in the texteditor and click save and save the file as MyActor.py
class MyActor(object):
def handleSocket(self, addr, msg, type, name, uuid, *args, **kwargs):
print("received OSC message {} {}".format(addr, msg))
return ("/MyActorMsg", [ "hello", "world", 42] )This is just the most basic actor which responds to incoming messages. A template you can use for a full feature actor is as follows:
class MyActor(object):
def __init__(self, *args, **kwargs):
self.timeout = 1000 # Use this timeout value for when you need recurring handleTimer events
# Set to -1 to wait infinite (default)
def handleApi(self, command, *args, **kwargs):
print("The API command is {} and its arguments is {}".format(command, args))
return None
def handleSocket(self, address, data, *args, **kwargs):
print("The osc address is {} and its data is {}".format(address, data))
return ("/myreturnaddress", ["hello", 3, 2, 1])
def handleTimer(self, *args, **kwargs):
# This is a timed event, use it as you need
print("My timed event with type: {}, name: {}, uuid: {}".format(args[0], args[1], args[2]))
return ("/mytimedreturn", ["hello", 1, 2, 3])
def handleCustomSocket(self, *args, **kwargs):
# We'll explain this in the future
return ("/myreturnaddress", ["hello", "world"])
def handleStop(self, *args, **kwargs):
# We are shutting down
print("Bye bye from {}".format(args[1]))Save this file as MyActor.py as the filename needs to equal the class name!
To create an actor in C++ you'll need to build GazebOSC from source as you will add the actor to the source. You can use the following example code as an example:
class MyActor : public Sphactor
{
public:
MyActor() : Sphactor() {}
static const char *capabilities; // this string is used to describe the capacilitites of the actor
zmsg_t *handleInit(sphactor_event_t *ev) // this method is called when the actor is started (added to the stage)
{ // you will receive an event (ev) with an message (ev->msg) which you will need to cleanup
if ( ev->msg )
zmsg_destroy(&ev->msg);
return nullptr; // you can return a message (zmsg) or nothing (nullptr)
}
zmsg_t *handleAPI(sphactor_event_t *ev) // this method is called when the actor's is edited from the UI
{ if ( ev->msg ) zmsg_destroy(&ev->msg); return nullptr; }
zmsg_t *handleSocket(sphactor_event_t *ev) // this method is called when the actor receives a message (usually OSC)
{
if ( ev->msg )
zmsg_destroy(&ev->msg);
return nullptr;
}
zmsg_t *handleStop(sphactor_event_t *ev) // this method is called when the actor is stopped (actor removed)
{ if ( ev->msg ) zmsg_destroy(&ev->msg); return nullptr; }
}Once created an actor needs to be registered by calling:
sphactor_register<MyActor>( "My Actor", MyActor::capabilities );This is usually done in GazebOSC's main.cpp
An actor in C only constists of a function receiving an event and a string describing its capabilities:
const char * countCapabilities = "inputs\n"
" input\n"
" type = \"OSC\"\n"
"outputs\n"
" output\n"
" type = \"OSC\"\n";
zmsg_t *
my_count_actor( sphactor_event_t *ev, void* args )
{
static int my_count_actor_count = 0;
if ( streq(ev->type, "INIT")) { // at INIT we load the capability string
sphactor_actor_set_capability((sphactor_actor_t*)ev->actor, zconfig_str_load(countCapabilities));
}
else
if ( streq(ev->type, "SOCK")) { // SOCK is when we receive a message (usually OSC)
my_count_actor_count++; // increment counter
// set a custom report (used in the UI)
zosc_t * msg = zosc_create("/report", "si",
"counter", (int32_t)my_count_actor_count);
sphactor_actor_set_custom_report_data( (sphactor_actor_t*)ev->actor, msg );
}
return ev->msg;
}Register the actor as follows:
sphactor_register( "My Count Actor", &my_count_actor, zconfig_str_load(countCapabilities), NULL, NULL );Once an actor has been created, it has the following states:
- INIT: actor has been created and runs in its own thread
- IDLE: actor is waiting for an event
- SOCK: actor has received a message
- FDSOCK: actor has received a message on a custom socket (filedescriptor)
- TIME: actor has received a timeout (timed event, probably scheduled by setting a timeout value
- STOP: actor has been stopped and threaded resources can be cleaned up (see OSCListener example)
- DESTROY: actor is destroyed
See libsphactor for details on the actor API.
Most dependencies are bundled in the repository. There is one main external ZeroMQ dependency you need to have available:
- libzmq
Dependencies for the build process / dependencies are:
- git, libtool, autoconf, automake, cmake, make, pkg-config, pcre
If you want Python support you'll need to have a recent Python >3.7 installed!
- Get build dependencies via brew:
brew install libtool autoconf automake pkg-config cmake makeClone and build libzmq
git clone https://github.com/zeromq/libzmq.git
cd libzmq
./autogen.sh && ./configure --without-documentation
make
sudo make installOnce the above dependencies are installed, you are ready to build Gazebosc.
- Clone the repo
git clone --recurse-submodules http://github.com/hku-ect/gazebosc.gitTo create an XCode project, perform the following commands from the root gazebosc git folder:
mkdir xcodeproj
cd xcodeproj
cmake -G Xcode ..This should generate a valid Xcode project that can run and pass tests.
In the root gazebosc git folder:
mkdir build
cd build
cmake ..
makeThe gazebosc executable will be in the bin folder!
- First install required dependencies
sudo apt-get update
sudo apt-get install -y \
build-essential libtool-bin cmake libasound2-dev \
pkg-config autotools-dev autoconf automake \
uuid-dev libpcre3-dev libsodium-dev python3-devgit clone https://github.com/zeromq/libzmq.git
cd libzmq
./autogen.sh && ./configure --without-documentation
make
sudo make installOnce the above dependencies are installed, you are ready to build Gazebosc:
- Clone the repo and build Gazebosc
git clone --recurse-submodules http://github.com/hku-ect/gazebosc.git
mkdir gazebosc/build
cd gazebosc/build
cmake ..
makeYou'll find the Gazebosc binary in the bin directory, to run:
cd bin
./gazeboscIf you want to work on Gazebosc it's easiest to use the QtCreator IDE. Just load the CMakeLists.txt as a project in QtCreator and run from there.
Use the following script:
sudo apt install git libtool-bin libdrm-dev libgbm-dev build-essential libtool-bin cmake \
pkg-config autotools-dev autoconf automake libevdev2 libgles2-mesa-dev \
uuid-dev libpcre3-dev libsodium-dev python3-dev libasound2-dev libxext-dev
git clone https://github.com/zeromq/libzmq.git
cd libzmq
./autogen.sh && ./configure --without-documentation
make
sudo make install
cd ..
git clone --recurse-submodules http://github.com/hku-ect/gazebosc.git
mkdir gazebosc/build
cd gazebosc/build
cmake .. -DWITH_OPENVR=OFF
CFLAGS=-mfpu=neon make-
Install Visual Studio 2019: https://visualstudio.microsoft.com/downloads/ , make sure to include:
- CMake
- Git
-
Clone gazebosc repository
git clone --recurse-submodules http://github.com/hku-ect/gazebosc.git- Run "x64 Native Tools Command Prompt for VS 2019" as Administrator
- Navigate to gazebosc project root
- Run "build_windows.bat"
- Navigate to gazebosc project root
- Run Visual Studio, and select Open -> CMake
- Navigate to gazebosc/CMakeListst.txt
- Select "gazebosc.vcxproj" from debug targets
You are now ready to code/debug as normal!
- Sphactor: actor model concurrency for creatives: https://archive.fosdem.org/2020/schedule/event/iotsphactor/
- Code Orchestration: https://archive.fosdem.org/2016/schedule/event/deviot02/
- Orchestrating computer systems, a new protocol: https://archive.fosdem.org/2015/schedule/event/deviot02/