CX 20 Auto pathfinder (Cheerson) tested with the APM ArduCopter v3.1.2 maiden flight
The Cheerson CX-20 Auto-pathfinder (or called the Quanum Nova) tested with the APM + ArduCopter v3.1.2
Tested material
- Cheerson CX-20 Auto-pathfinder (or Quanum Nova) with factory setup
- GoPro 3 "Black Edition" without gimball (not included in the main kit)



The APM is preloaded with the Arducopter v3.1.2 which can be set through its USB port
 The USB port is located at the bottom
The USB port is located at the bottom
There is also PPM output for the Roll/Pitch control of the gimbal and a dual 12v outputs
 This is a full APM board with a data logger
This is a full APM board with a data logger





The Lipo battery provided in the kit

The flight modes are factory installed (STABILIZE, ALTHOLD, LOITER, SUPER SIMPLE...)


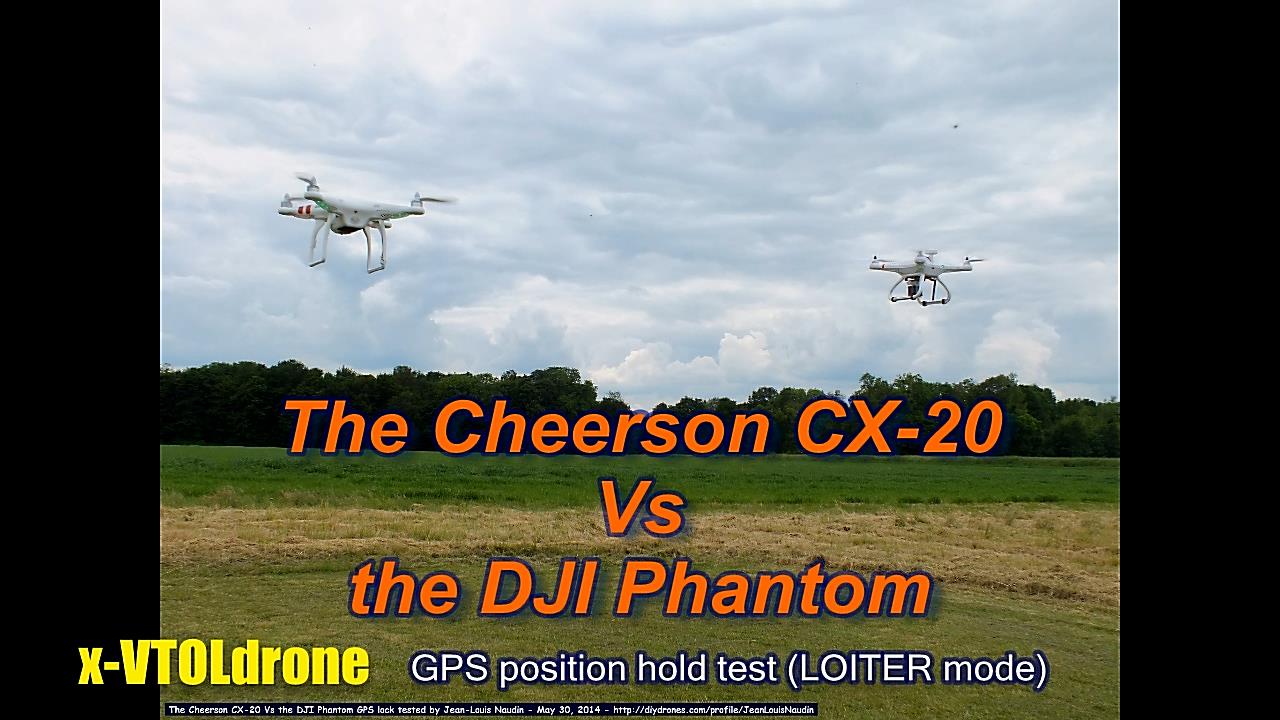
The flight is really stable and the GPS position is strongly locked in LOITER mode

The factory PID parameters successfully tested in flight

- The full PID parameters files can be found at:
https://github.com/jlnaudin/x-VTOLdrone/blob/master/param/CX20_PID_factory.param
To download the parameters file, mouse right-clic on RAW button
- Maiden test flight

The VIDEO of the maiden flight with the CX-20 and filmed from the GoPro 3:

The Cheerson CX-20 Vs the DJI Phantom in GPS Position Hold (LOITER):
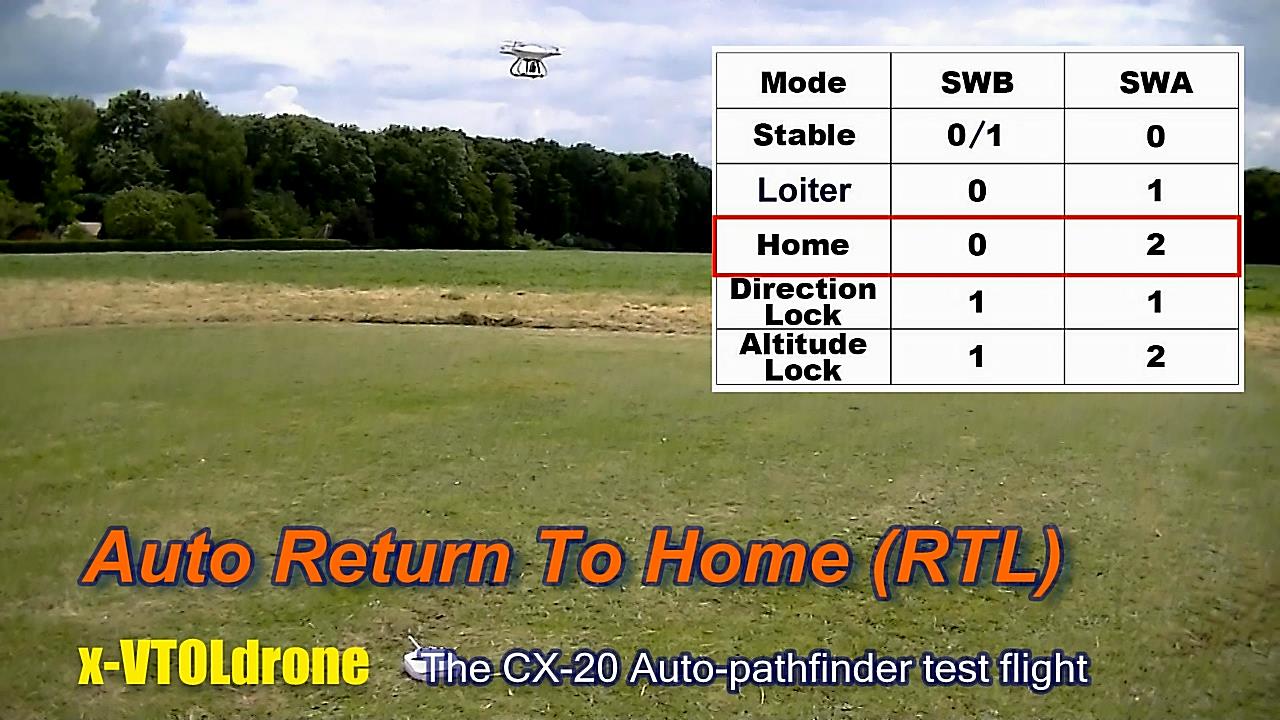
The Cheerson CX-20 test of the Auto-Return To Home (RTL):
NEXT CHAPTER: INSIDE the CX-20