Husky
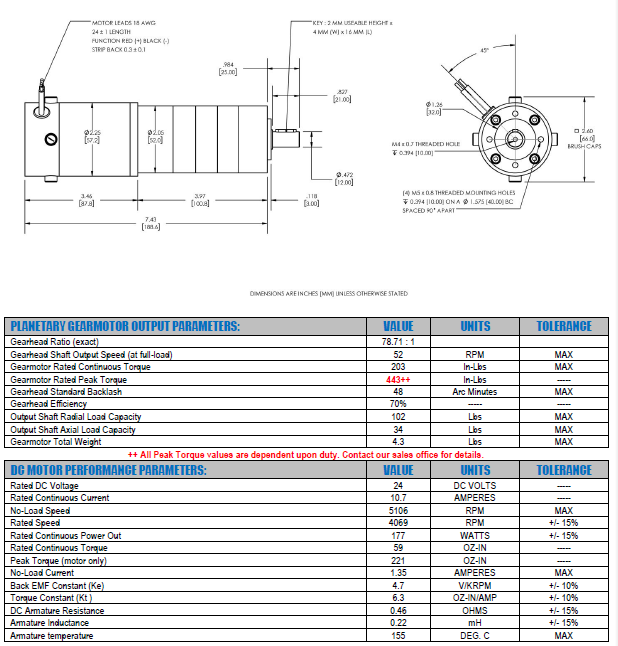
The Husky has motors with the following parameters :
The Husky has two MDL-BDC24 motor drivers in a controller / device configuration. Communication between both drivers is done through a CAN bus (120 ohm resistors are plugged on each side), while communication with the main onboard computer is done through a serial port.
There is a TP-Link AC750 Wifi Travel Router Module installed on the robot. The SSID is TP-Link_F34D. The password is 00650687. To access the admin panel of the module, connect to the Wifi and go to http://tplinkwifi.net (wait 10-20s even if there's a "Can't access' error page. The web page is slow to initialize). The username is admin and the password is admin. The Wifi device is configured to AP/Rng Ext/Client in order to create a Wifi Access Point to bridge the ethernet connection to Wifi clients.