WM330 Battery Intelligent Board
Function
Variants
Parts
Programming
External interfaces
Service interfaces
Board view
Schematics
DJI Intelligent Flight Battery for Phantom 4 is a 5870mAh, 15.2V LiPo-4s battery, supporting up to 28 minutes of flight time. The battery also has built-in sensors and bright LEDs that let you know the status and remaining power. It contains automatic discharge feature to avoid swelling (fully charged LiPo cells release hydrogen), and Permanent Failure feature which disables the battery in case of damage or unexpected behavior of cells.
The battery management system chip (TI BQ30Z55) is queried for data by a small micro-controller (TI MSP430) through a Smart Battery System protocol. That micro-controller sends updates to the FC in regard to current battery status.
The SBS protocol defines battery-related commands to be transferred over SMBus, which in turn is deviced from I2C.
There are multiple versions of the board.
| Marking | Overview |
|---|---|
| P01438.06 |
| Marking | Amt. | Pkg. | Function | Specification |
|---|---|---|---|---|
| MSP430 G2755 | 1 | Texas Instruments MSP430 MCU is used to control the battery and external interfaces. | description datasheet | |
| BQ30Z55 | 1 | TSSOP-30 | Integrated 2-Series, 3-Series, and 4-Series Li-Ion or Li-Polymer Cell Battery Pack Manager and Protection; the specific chip was only made available by TI for a few customers, but it is very similar to BQ30Z554. Also, its spec can be found in various places (sluu852a.pdf). | description applc.note |
| 10-slab EXT PWR | 1 | MSD-DB01F-10P, MISTA 10A pitch 2.5mm 10 pin connector | description |
| Chips | Firmware | Description |
|---|---|---|
| BQ30Z55 | Battery control chip; it has firmware, but that is not publicly available. | |
| MSP430 | Small micro-controller which queries the BQ30Z55 for battery status and sends the information to Flight Controller. |
Connectors on the board are:
| Marking | Overview |
|---|---|
| 10-slab EXT PWR | External connector of the battery; provides power input and output, and serial interface. |
Here is the connector pinout:
| Pin | Label | Function |
|---|---|---|
| 1 | UART_RX/UART_TX? | |
| 2 | GND | Ground |
| 3 | GND | |
| 4 | PACK+ | +15.2V from battery cells |
| 5 | PACK+ | |
| 6 | PACK+ | |
| 7 | PACK+ | |
| 8 | GND | |
| 9 | GND | |
| 10 | UART_TX/UART_RX? |
The following service pads exist on this board:
| Marking | Overview |
|---|---|
| TODO |
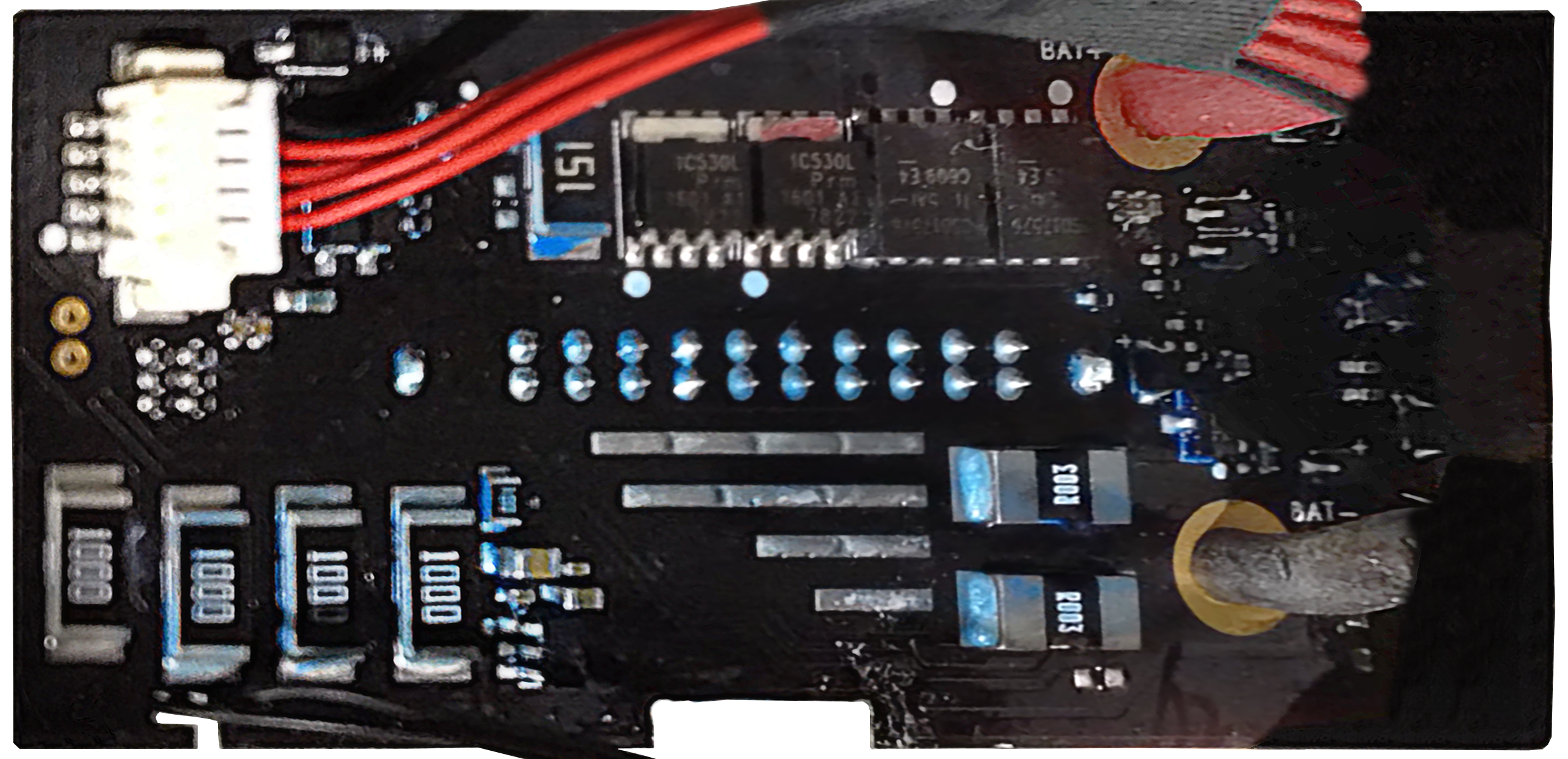
Top of a P01438.06 board:

Bottom of the P01438.06 board:
flowchart LR
Connector-BAT((batt<br/>connec<br/>tor))
subgraph Battery Intelligent board
direction LR
BatteryMCU[MSP430 MCU<br/>Battery<br/>interface<br/>control]
BatteryBMS[BQ30Z55 BMS<br/>Li-Po pack<br/>manager]
BattFeedbackR(0.02 Ohm<br/>feedback<br/>resistor)
BatteryButton(button)
BatteryLEDs(LED line)
BatteryMCU-- GPIO ---BatteryButton
BatteryMCU-- GPIO ---BatteryLEDs
EnablePackFET(MOSFET<br/>output<br/>control)
EnableChargeFET(MOSFET<br/>charge<br/>enable)
EnableDischargeFET(MOSFET<br/>internal<br/>discharge<br/>enable)
DischargeR(discharge<br/>resistor)
DischargeR---EnableDischargeFET
BatteryBMS-- DSG ---EnableDischargeFET
BatteryMCU-- SMBus ---BatteryBMS
BatteryBMS-- GPOD ---EnablePackFET
BatteryBMS-- CHG ---EnableChargeFET
end
subgraph Li-Po cells pack
direction TB
BatteryCell1(battery<br/>cell 1)
BatteryCell2(battery<br/>cell 2)
BatteryCell3(battery<br/>cell 3)
BatteryCell4(battery<br/>cell 4)
BatteryTempSense(NTC<br/>thermistor)
BatteryCell1===BatteryCell2
BatteryCell3===BatteryCell2
BatteryCell4===BatteryCell3
end
BattFeedbackR===BatteryCell1
BatteryBMS-- VSS ---BatteryCell1
BatteryBMS---BatteryCell2
BatteryBMS---BatteryCell3
BatteryBMS---BatteryCell4
Connector-BAT== PACK- ===BattFeedbackR
BatteryBMS-- SRn ---BattFeedbackR
BatteryBMS-- TS ---BatteryTempSense
EnableDischargeFET===BatteryCell4
EnablePackFET===EnableDischargeFET
EnableChargeFET===EnableDischargeFET
Connector-BAT== PACK+ ===EnablePackFET
Connector-BAT== PACK+ ===EnableChargeFET
Connector-BAT-- UART ---BatteryMCU
Thick lines are the ones transferring high power. Feedback resistor for measuring current is inserted into negative line, while all the MOSFET switches are within positive line. The four Li-Po cells are connected in series, so that the voltage sums up.
The Battery Management System chip is not designed to have any user interface, so that is handled by the additional micro-controller. The MCU communicates with BMS using the protocol described in Smart Battery Specification, over SMBus interface. The charge level, as well as errors retieved from the BMS, can be shown on attached line of four LEDs. The MCU can also read button state, and ask the BMS to start or shutdown the power delivery.
No schematics available.